|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
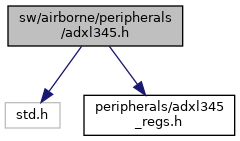
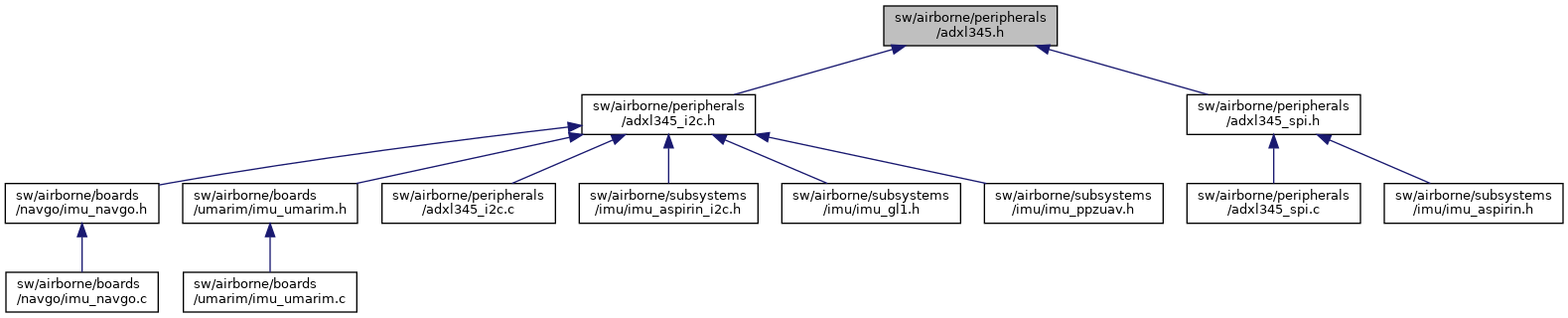
 Include dependency graph for adxl345.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for adxl345.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | Adxl345Config |
Enumerations | |
| enum | Adxl345ConfStatus { ADXL_CONF_UNINIT = 0, ADXL_CONF_RATE = 1, ADXL_CONF_INT = 2, ADXL_CONF_FORMAT = 3, ADXL_CONF_ENABLE = 4, ADXL_CONF_DONE = 5 } |
Functions | |
| static void | adxl345_set_default_config (struct Adxl345Config *c) |
| static uint8_t | adxl345_data_format (struct Adxl345Config *c) |
Analog Devices ADXL345 accelerometer driver common interface (I2C and SPI).
Definition in file adxl345.h.
| struct Adxl345Config |
| Data Fields | ||
|---|---|---|
| bool | drdy_int_enable | Enable Data Ready Interrupt. |
| bool | full_res | Full Resolution: FALSE: 10bit, TRUE: full with 4mg/LSB. |
| bool | int_invert | Invert Interrupt FALSE: active high, TRUE: active low. |
| bool | justify_msb | justify: FALSE: right with sign-extension, TRUE: MSB (left) |
| enum Adxl345Ranges | range | g Range |
| enum Adxl345Rates | rate | Data Output Rate. |
| bool | self_test | Enable self-test-force causing shift in output data. |
| bool | spi_3_wire | Set 3-wire SPI mode, if FALSE: 4-wire SPI mode. |
| enum Adxl345ConfStatus |
|
inlinestatic |
Definition at line 69 of file adxl345.h.
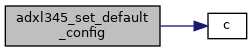
References c().
Referenced by adxl345_spi_send_config().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 56 of file adxl345.h.
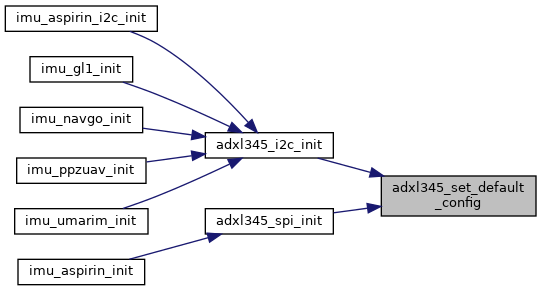
References ADXL345_RANGE_16G, ADXL345_RATE_100HZ, and c().
Referenced by adxl345_i2c_init(), and adxl345_spi_init().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.17
1.8.17