|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
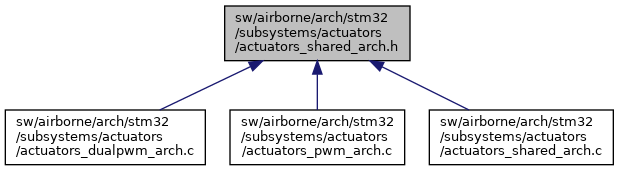
#include "std.h"#include <BOARD_CONFIG>#include <libopencm3/stm32/gpio.h>#include <libopencm3/stm32/rcc.h>#include <libopencm3/stm32/timer.h>#include <libopencm3/cm3/nvic.h>#include "mcu_arch.h" Include dependency graph for actuators_shared_arch.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for actuators_shared_arch.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | ONE_MHZ_CLK 1000000 |
| #define | PWM_BASE_FREQ ONE_MHZ_CLK |
| #define | SERVO_HZ 40 |
| Default servo update rate in Hz. More... | |
| #define | TIM1_SERVO_HZ SERVO_HZ |
| #define | TIM2_SERVO_HZ SERVO_HZ |
| #define | TIM3_SERVO_HZ SERVO_HZ |
| #define | TIM4_SERVO_HZ SERVO_HZ |
| #define | TIM5_SERVO_HZ SERVO_HZ |
| #define | TIM8_SERVO_HZ SERVO_HZ |
| #define | TIM9_SERVO_HZ SERVO_HZ |
| #define | TIM12_SERVO_HZ SERVO_HZ |
Functions | |
| void | actuators_pwm_arch_channel_init (uint32_t timer_peripheral, enum tim_oc_id oc_id) |
| Set PWM channel configuration. More... | |
| void | set_servo_timer (uint32_t timer, uint32_t period, uint8_t channels_mask) |
| Set Timer configuration. More... | |
STM32 PWM and dualPWM servos shared functions.
Definition in file actuators_shared_arch.h.
| #define ONE_MHZ_CLK 1000000 |
Definition at line 39 of file actuators_shared_arch.h.
| #define PWM_BASE_FREQ ONE_MHZ_CLK |
Definition at line 43 of file actuators_shared_arch.h.
| #define SERVO_HZ 40 |
Default servo update rate in Hz.
Definition at line 49 of file actuators_shared_arch.h.
| #define TIM12_SERVO_HZ SERVO_HZ |
Definition at line 75 of file actuators_shared_arch.h.
| #define TIM1_SERVO_HZ SERVO_HZ |
Definition at line 54 of file actuators_shared_arch.h.
| #define TIM2_SERVO_HZ SERVO_HZ |
Definition at line 57 of file actuators_shared_arch.h.
| #define TIM3_SERVO_HZ SERVO_HZ |
Definition at line 60 of file actuators_shared_arch.h.
| #define TIM4_SERVO_HZ SERVO_HZ |
Definition at line 63 of file actuators_shared_arch.h.
| #define TIM5_SERVO_HZ SERVO_HZ |
Definition at line 66 of file actuators_shared_arch.h.
| #define TIM8_SERVO_HZ SERVO_HZ |
Definition at line 69 of file actuators_shared_arch.h.
| #define TIM9_SERVO_HZ SERVO_HZ |
Definition at line 72 of file actuators_shared_arch.h.
| void actuators_pwm_arch_channel_init | ( | uint32_t | timer_peripheral, |
| enum tim_oc_id | oc_id | ||
| ) |
Set PWM channel configuration.
Definition at line 35 of file actuators_shared_arch.c.
Referenced by set_servo_timer().
Here is the caller graph for this function:Set Timer configuration.
| [in] | timer | Timer register address base |
| [in] | freq | PWM frequency in Hz (1 / auto-reload period) |
| [in] | channels_mask | output compare channels to enable |
Definition at line 59 of file actuators_shared_arch.c.
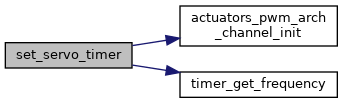
References actuators_pwm_arch_channel_init(), PWM_BASE_FREQ, and timer_get_frequency().
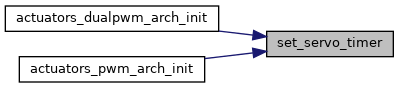
Referenced by actuators_dualpwm_arch_init(), and actuators_pwm_arch_init().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.17
1.8.17