|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
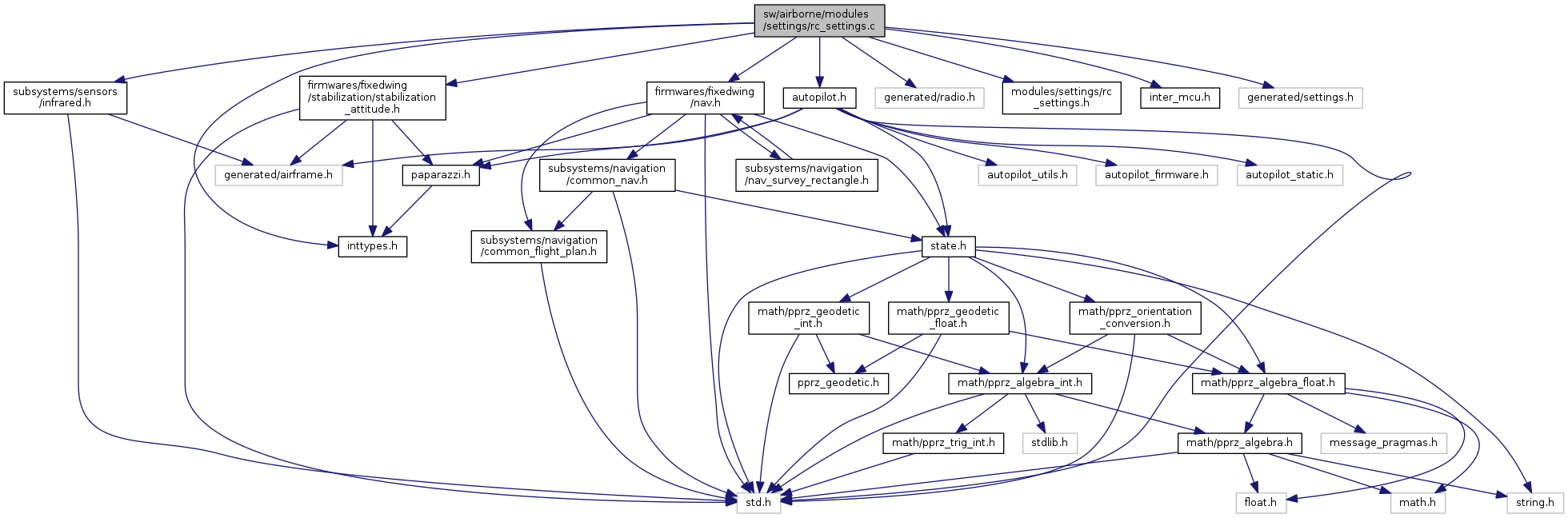
#include <inttypes.h>#include "generated/radio.h"#include "modules/settings/rc_settings.h"#include "autopilot.h"#include "firmwares/fixedwing/nav.h"#include "subsystems/sensors/infrared.h"#include "inter_mcu.h"#include "firmwares/fixedwing/stabilization/stabilization_attitude.h"#include "generated/settings.h" Include dependency graph for rc_settings.c:
Include dependency graph for rc_settings.c:Go to the source code of this file.
Macros | |
| #define | ParamValInt16(param_init_val, param_travel, cur_pulse, init_pulse) (param_init_val + (int16_t)(((float)(cur_pulse - init_pulse)) * param_travel / (float)MAX_PPRZ)) |
| #define | ParamValFloat(param_init_val, param_travel, cur_pulse, init_pulse) (param_init_val + ((float)(cur_pulse - init_pulse)) * param_travel / (float)MAX_PPRZ) |
| #define | RcChannel(x) (imcu_get_radio(x)) |
Functions | |
| void | rc_settings (bool mode_changed) |
| Includes generated code from tuning_rc.xml. More... | |
Variables | |
| uint8_t | rc_settings_mode = 0 |
| float | slider_1_val |
| float | slider_2_val |
| #define ParamValFloat | ( | param_init_val, | |
| param_travel, | |||
| cur_pulse, | |||
| init_pulse | |||
| ) | (param_init_val + ((float)(cur_pulse - init_pulse)) * param_travel / (float)MAX_PPRZ) |
Definition at line 40 of file rc_settings.c.
| #define ParamValInt16 | ( | param_init_val, | |
| param_travel, | |||
| cur_pulse, | |||
| init_pulse | |||
| ) | (param_init_val + (int16_t)(((float)(cur_pulse - init_pulse)) * param_travel / (float)MAX_PPRZ)) |
Definition at line 37 of file rc_settings.c.
| #define RcChannel | ( | x | ) | (imcu_get_radio(x)) |
Definition at line 43 of file rc_settings.c.
| void rc_settings | ( | bool | mode_changed | ) |
Includes generated code from tuning_rc.xml.
Definition at line 49 of file rc_settings.c.
Referenced by autopilot_static_on_rc_frame().
Here is the caller graph for this function:| uint8_t rc_settings_mode = 0 |
Definition at line 34 of file rc_settings.c.
| float slider_1_val |
Definition at line 35 of file rc_settings.c.
| float slider_2_val |
Definition at line 35 of file rc_settings.c.
 1.8.8
1.8.8