|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
from OSAM advanced navigation routines More...
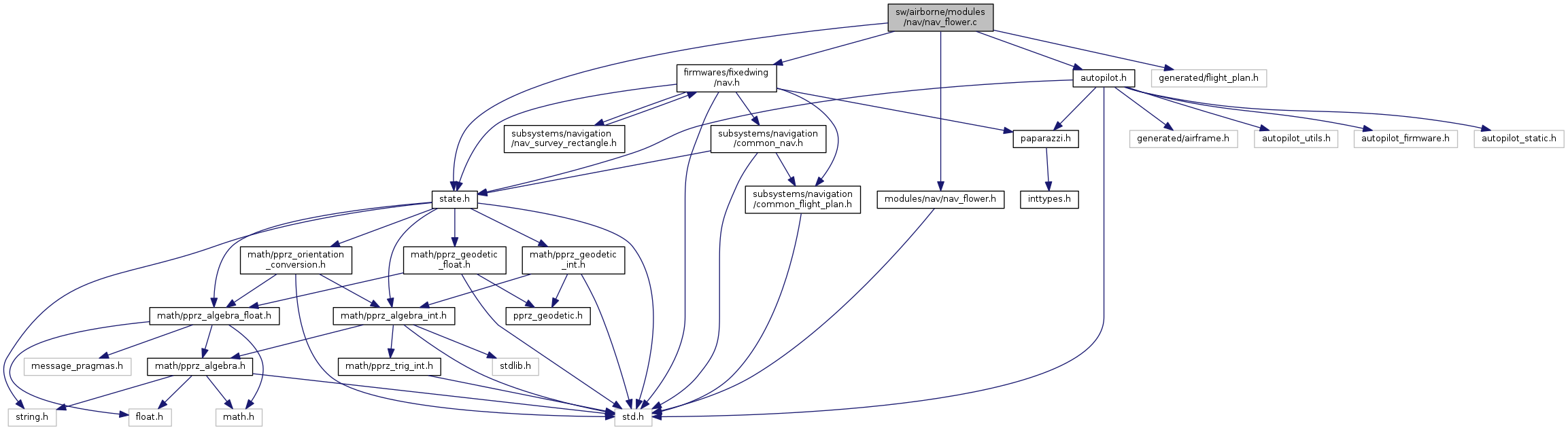
#include "modules/nav/nav_flower.h"#include "firmwares/fixedwing/nav.h"#include "state.h"#include "autopilot.h"#include "generated/flight_plan.h" Include dependency graph for nav_flower.c:
Include dependency graph for nav_flower.c:Go to the source code of this file.
Enumerations | |
| enum | FlowerStatus { Outside, FlowerLine, Circle } |
| Makes a flower pattern. More... | |
Functions | |
| void | nav_flower_init (void) |
| void | nav_flower_setup (uint8_t CenterWP, uint8_t EdgeWP) |
| bool | nav_flower_run (void) |
Variables | |
| static enum FlowerStatus | CFlowerStatus |
| static float | CircleX |
| static float | CircleY |
| static float | Fly2X |
| static float | Fly2Y |
| static float | FlyFromX |
| static float | FlyFromY |
| static float | TransCurrentX |
| static float | TransCurrentY |
| static float | EdgeCurrentX |
| static float | EdgeCurrentY |
| static float | DistanceFromCenter |
| static float | FlowerTheta |
| static float | Flowerradius |
| static uint8_t | Center |
| static uint8_t | Edge |
from OSAM advanced navigation routines
Definition in file nav_flower.c.
| enum FlowerStatus |
Makes a flower pattern.
CenterWP is the center of the flower. The Navigation Height is taken from this waypoint. EdgeWP defines the radius of the flower (distance from CenterWP to EdgeWP)
| Enumerator | |
|---|---|
| Outside | |
| FlowerLine | |
| Circle | |
Definition at line 67 of file nav_flower.c.
| void nav_flower_init | ( | void | ) |
Definition at line 53 of file nav_flower.c.
References mission_register().
Here is the call graph for this function:| bool nav_flower_run | ( | void | ) |
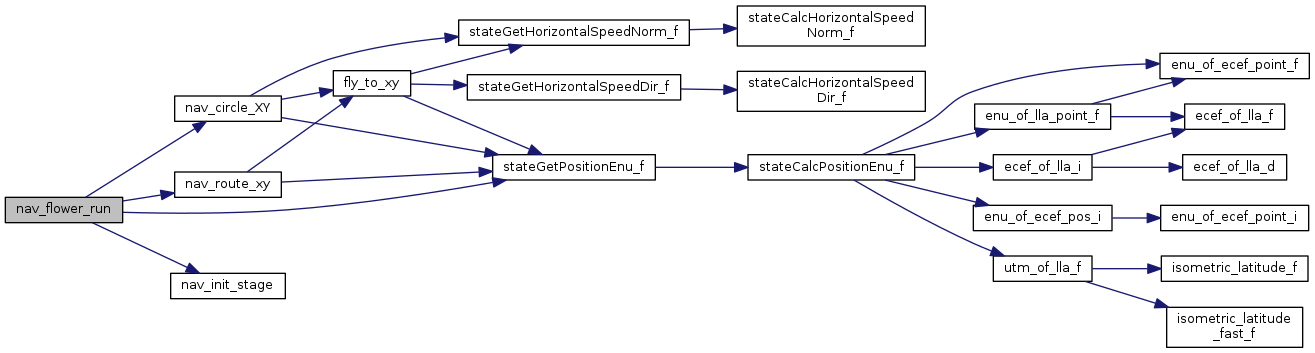
Definition at line 115 of file nav_flower.c.
References Circle, FlowerLine, Flowerradius, nav_circle_XY(), nav_init_stage(), nav_radius, nav_route_xy(), NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, Outside, stateGetPositionEnu_f(), waypoints, WaypointX, WaypointY, EnuCoor_f::x, and EnuCoor_f::y.
Here is the call graph for this function:Definition at line 85 of file nav_flower.c.
References FlowerLine, Outside, stateGetPositionEnu_f(), WaypointX, WaypointY, EnuCoor_f::x, and EnuCoor_f::y.
Here is the call graph for this function:
|
static |
Definition at line 82 of file nav_flower.c.
|
static |
Definition at line 68 of file nav_flower.c.
|
static |
Definition at line 69 of file nav_flower.c.
|
static |
Definition at line 70 of file nav_flower.c.
|
static |
Definition at line 79 of file nav_flower.c.
|
static |
Definition at line 83 of file nav_flower.c.
|
static |
Definition at line 77 of file nav_flower.c.
|
static |
Definition at line 78 of file nav_flower.c.
|
static |
Definition at line 81 of file nav_flower.c.
Referenced by nav_flower_run().
|
static |
Definition at line 80 of file nav_flower.c.
|
static |
Definition at line 71 of file nav_flower.c.
|
static |
Definition at line 72 of file nav_flower.c.
|
static |
Definition at line 73 of file nav_flower.c.
|
static |
Definition at line 74 of file nav_flower.c.
|
static |
Definition at line 75 of file nav_flower.c.
|
static |
Definition at line 76 of file nav_flower.c.
 1.8.8
1.8.8