|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
Improvement of the missionlib implementation of the waypoint protocol, truly global waypoints are used such that they will not be relocated after you run GeoInit. More...
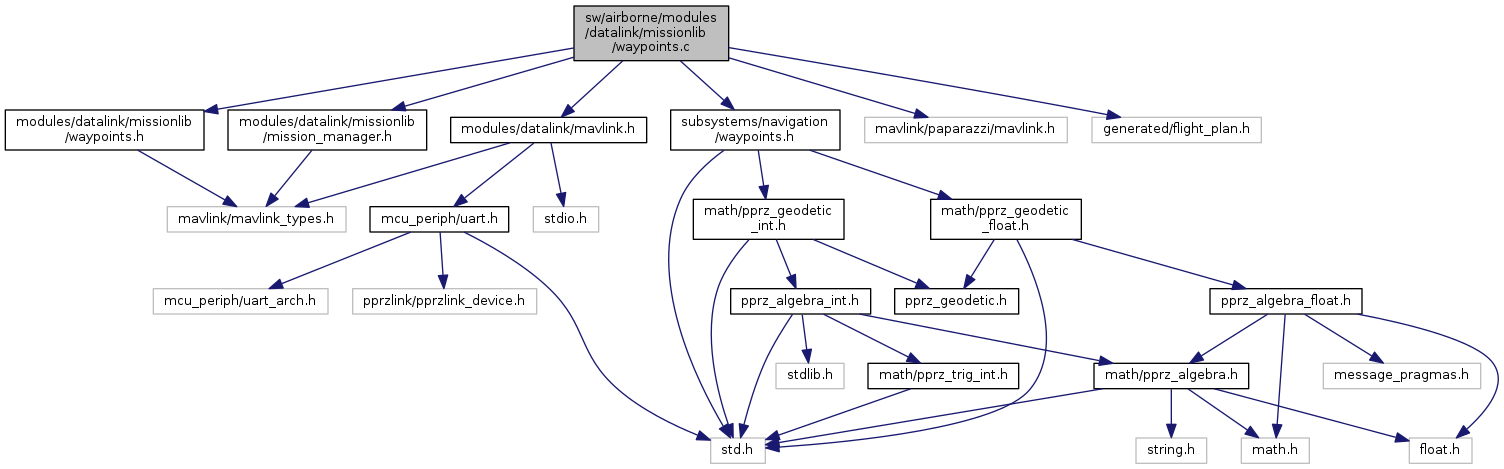
#include "modules/datalink/missionlib/waypoints.h"#include "modules/datalink/missionlib/mission_manager.h"#include "modules/datalink/mavlink.h"#include "mavlink/paparazzi/mavlink.h"#include "generated/flight_plan.h"#include "subsystems/navigation/waypoints.h" Include dependency graph for waypoints.c:
Include dependency graph for waypoints.c:Go to the source code of this file.
Functions | |
| static void | mavlink_send_wp (uint8_t sysid, uint8_t compid, uint16_t seq) |
| void | mavlink_wp_message_handler (const mavlink_message_t *msg) |
Improvement of the missionlib implementation of the waypoint protocol, truly global waypoints are used such that they will not be relocated after you run GeoInit.
Definition in file waypoints.c.
Definition at line 48 of file waypoints.c.
References LlaCoor_i::alt, LlaCoor_i::lat, LlaCoor_i::lon, MAVLINK_DEBUG, MAVLinkSendMessage, waypoint_get_lla(), WaypointAlt, WaypointX, and WaypointY.
Referenced by mavlink_wp_message_handler().
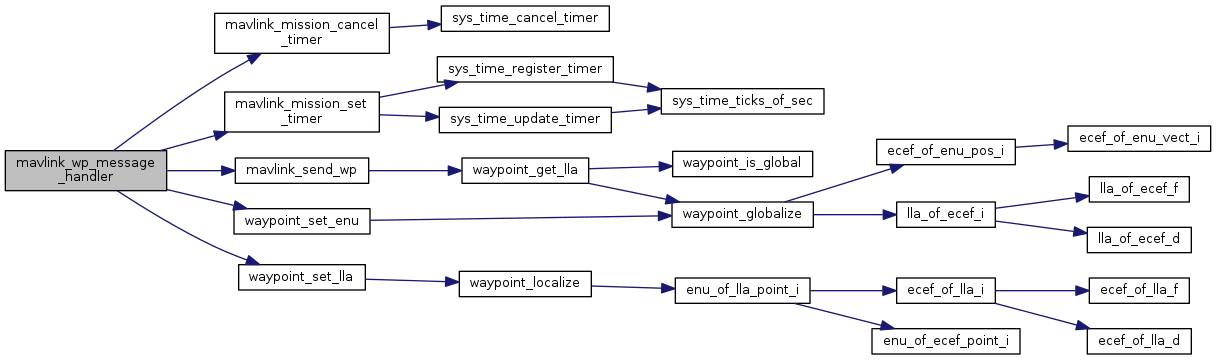
Here is the call graph for this function: Here is the caller graph for this function:| void mavlink_wp_message_handler | ( | const mavlink_message_t * | msg | ) |
Definition at line 91 of file waypoints.c.
References LlaCoor_i::alt, LtpDef_i::hmsl, LlaCoor_i::lat, LlaCoor_i::lon, MAVLINK_DEBUG, mavlink_mission_cancel_timer(), mavlink_mission_set_timer(), mavlink_send_wp(), mavlink_system, MAVLinkSendMessage, mission_mgr, State::ned_origin_i, mavlink_mission_mgr::rem_compid, mavlink_mission_mgr::rem_sysid, mavlink_mission_mgr::seq, mavlink_mission_mgr::state, state, STATE_IDLE, STATE_SEND_ITEM, STATE_SEND_LIST, STATE_WAYPOINT_WRITE_TRANSACTION, waypoint_set_enu(), waypoint_set_lla(), EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
Referenced by mavlink_mission_message_handler().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8