|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
Guidance algorithm based on vector fields. More...
#include "std.h" Include dependency graph for gvf.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for gvf.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | gvf_con |
| struct | gvf_tra |
| struct | gvf_seg |
| struct | gvf_grad |
| struct | gvf_Hess |
Macros | |
| #define | GVF_GRAVITY 9.806 |
Enumerations | |
| enum | trajectories { LINE = 0, ELLIPSE, SIN, NONE = 255 } |
Functions | |
| void | gvf_init (void) |
| void | gvf_control_2D (float ke, float kn, float e, struct gvf_grad *, struct gvf_Hess *) |
| void | gvf_set_direction (int8_t s) |
| bool | gvf_line_XY_heading (float x, float y, float heading) |
| bool | gvf_line_XY1_XY2 (float x1, float y1, float x2, float y2) |
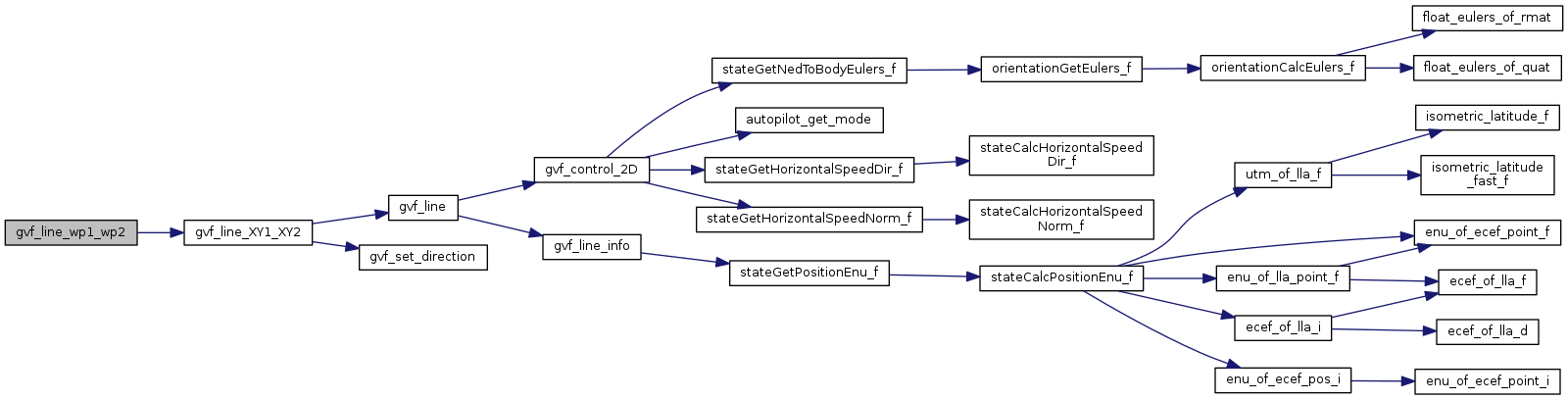
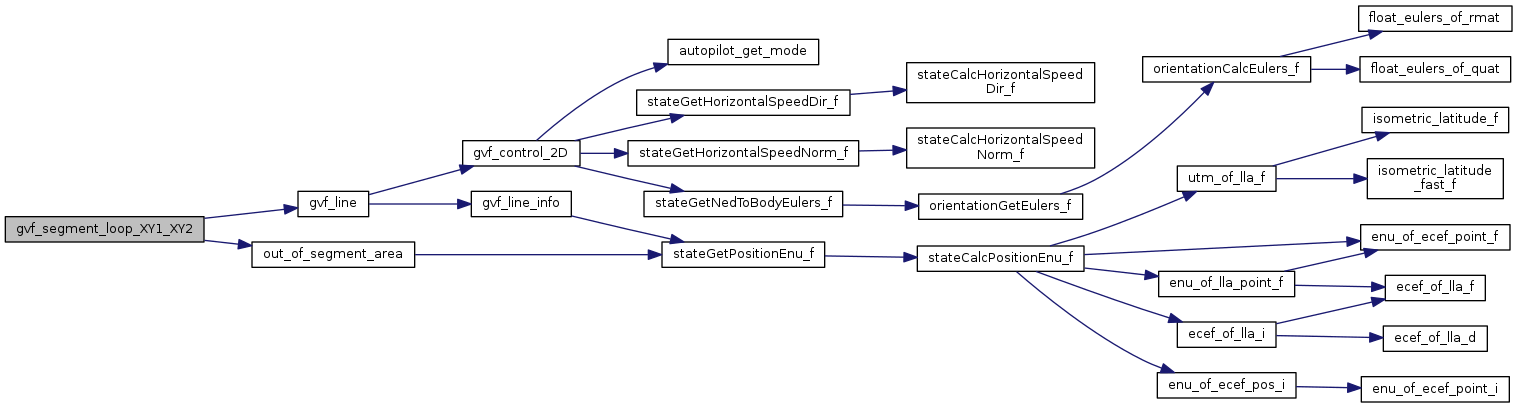
| bool | gvf_line_wp1_wp2 (uint8_t wp1, uint8_t wp2) |
| bool | gvf_segment_loop_XY1_XY2 (float x1, float y1, float x2, float y2, float d1, float d2) |
| bool | gvf_segment_loop_wp1_wp2 (uint8_t wp1, uint8_t wp2, float d1, float d2) |
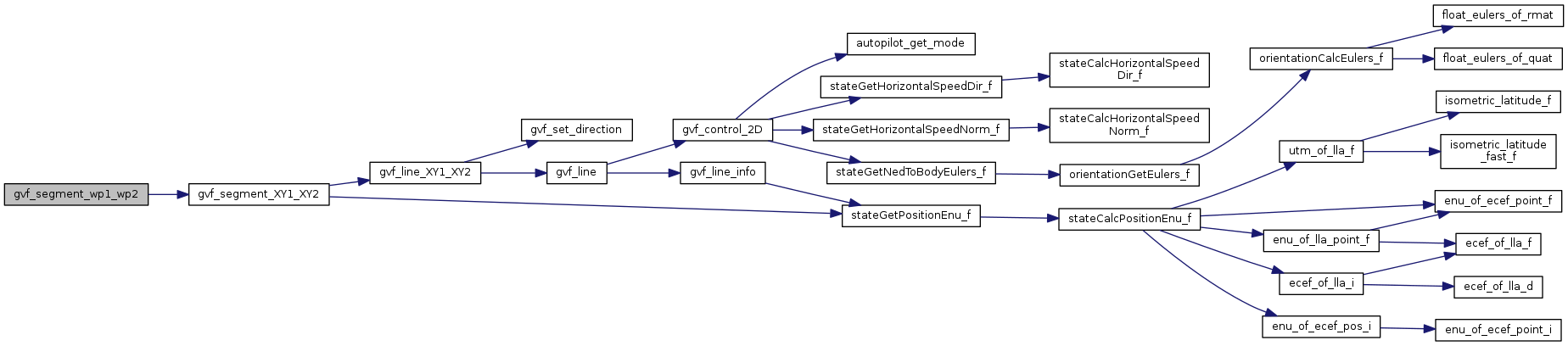
| bool | gvf_segment_XY1_XY2 (float x1, float y1, float x2, float y2) |
| bool | gvf_segment_wp1_wp2 (uint8_t wp1, uint8_t wp2) |
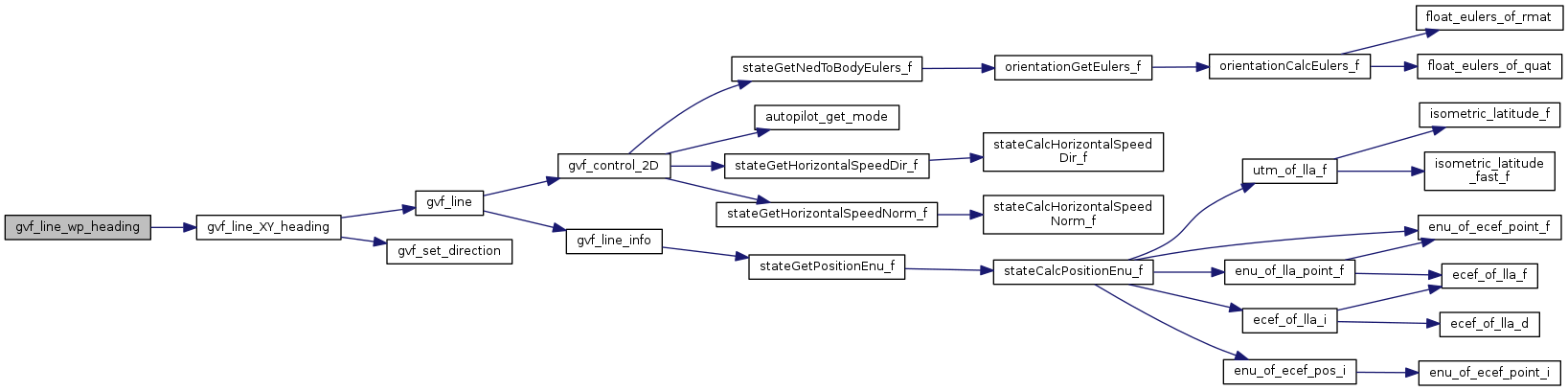
| bool | gvf_line_wp_heading (uint8_t wp, float heading) |
| bool | gvf_ellipse_wp (uint8_t wp, float a, float b, float alpha) |
| bool | gvf_ellipse_XY (float x, float y, float a, float b, float alpha) |
| bool | gvf_sin_XY_alpha (float x, float y, float alpha, float w, float off, float A) |
| bool | gvf_sin_wp1_wp2 (uint8_t wp1, uint8_t wp2, float w, float off, float A) |
| bool | gvf_sin_wp_alpha (uint8_t wp, float alpha, float w, float off, float A) |
Variables | |
| gvf_con | gvf_control |
| gvf_tra | gvf_trajectory |
Guidance algorithm based on vector fields.
Definition in file gvf.h.
| struct gvf_con |
| struct gvf_tra |
| Data Fields | ||
|---|---|---|
| float | p[16] | |
| enum trajectories | type | |
| struct gvf_seg |
| struct gvf_Hess |
| #define GVF_GRAVITY 9.806 |
Definition at line 31 of file gvf.h.
Referenced by gvf_control_2D().
| enum trajectories |
Definition at line 139 of file gvf.c.
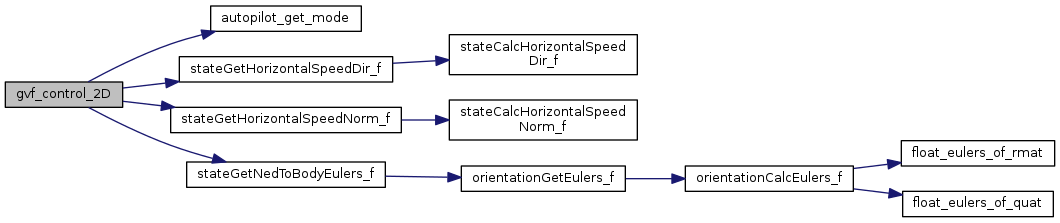
References AP_MODE_AUTO2, autopilot_get_mode(), course, GVF_GRAVITY, gvf_Hess::H11, gvf_Hess::H12, gvf_Hess::H21, gvf_Hess::H22, h_ctl_roll_max_setpoint, h_ctl_roll_setpoint, lateral_mode, LATERAL_MODE_ROLL, gvf_grad::nx, gvf_grad::ny, gvf_con::s, stateGetHorizontalSpeedDir_f(), stateGetHorizontalSpeedNorm_f(), stateGetNedToBodyEulers_f(), and FloatEulers::theta.
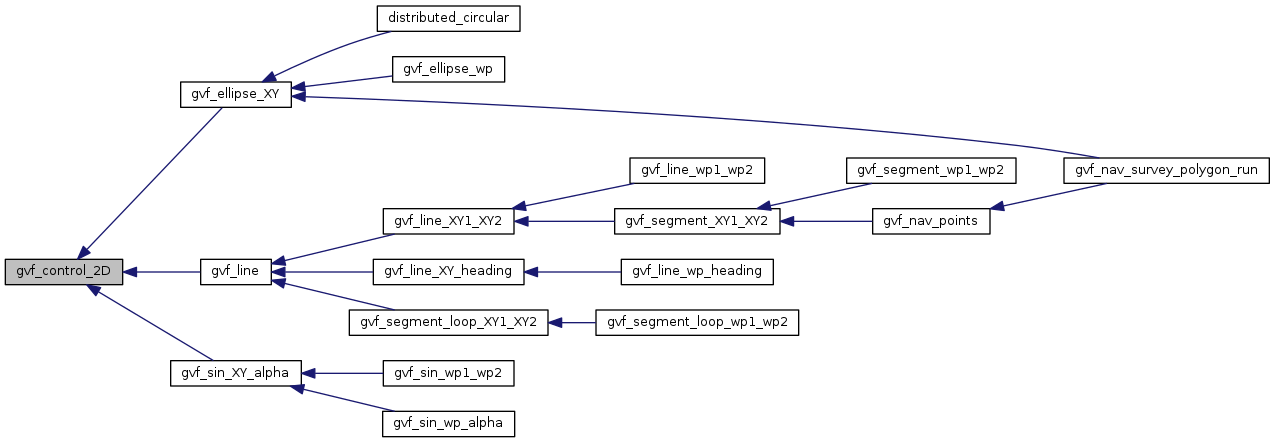
Referenced by gvf_ellipse_XY(), gvf_line(), and gvf_sin_XY_alpha().
Here is the call graph for this function: Here is the caller graph for this function:| bool gvf_ellipse_wp | ( | uint8_t | wp, |
| float | a, | ||
| float | b, | ||
| float | alpha | ||
| ) |
Definition at line 392 of file gvf.c.
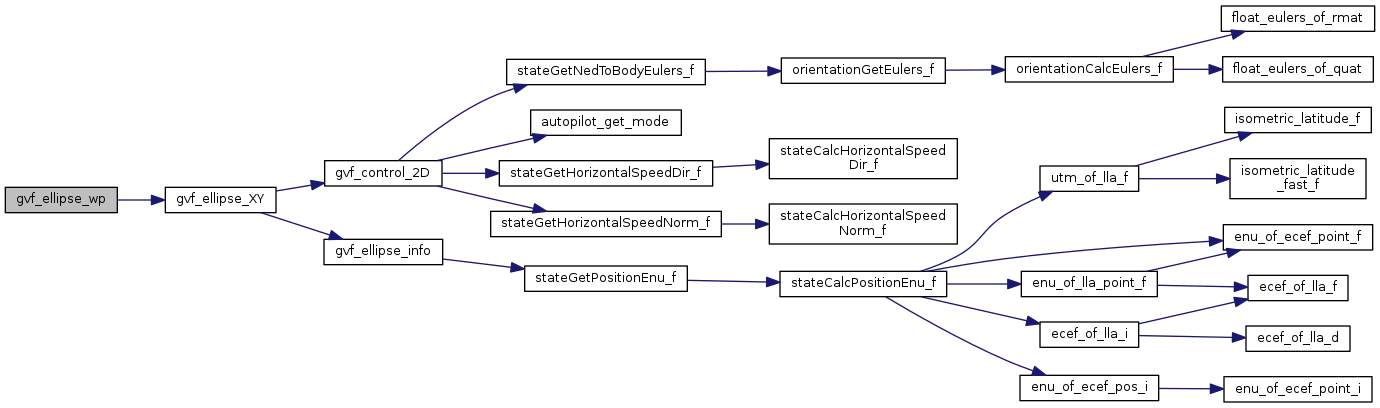
References gvf_ellipse_XY(), and waypoints.
Here is the call graph for this function:| bool gvf_ellipse_XY | ( | float | x, |
| float | y, | ||
| float | a, | ||
| float | b, | ||
| float | alpha | ||
| ) |
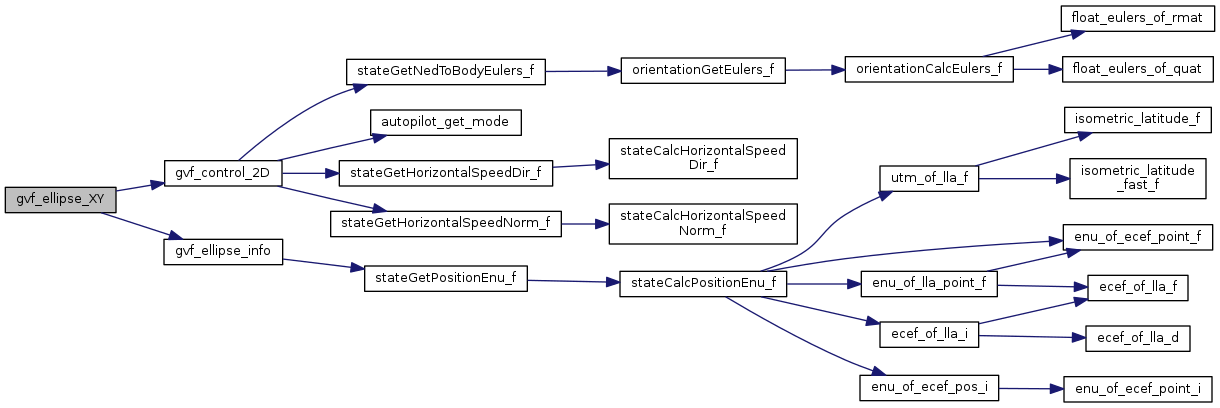
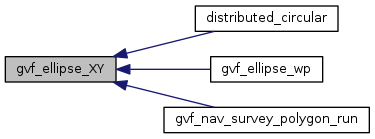
Definition at line 356 of file gvf.c.
References alpha, gvf_con::error, gvf_control_2D(), gvf_ellipse_info(), gvf_ellipse_par, horizontal_mode, HORIZONTAL_MODE_CIRCLE, HORIZONTAL_MODE_WAYPOINT, gvf_ell_par::ke, gvf_con::ke, gvf_ell_par::kn, gvf_tra::p, and gvf_tra::type.
Referenced by distributed_circular(), gvf_ellipse_wp(), and gvf_nav_survey_polygon_run().
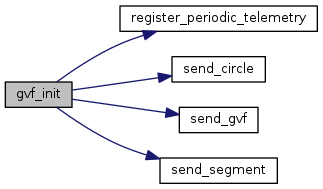
Here is the call graph for this function: Here is the caller graph for this function:| void gvf_init | ( | void | ) |
Definition at line 124 of file gvf.c.
References DefaultPeriodic, gvf_con::ke, gvf_con::kn, NONE, register_periodic_telemetry(), gvf_con::s, send_circle(), send_gvf(), send_segment(), and gvf_tra::type.
Here is the call graph for this function:| bool gvf_line_wp_heading | ( | uint8_t | wp, |
| float | heading | ||
| ) |
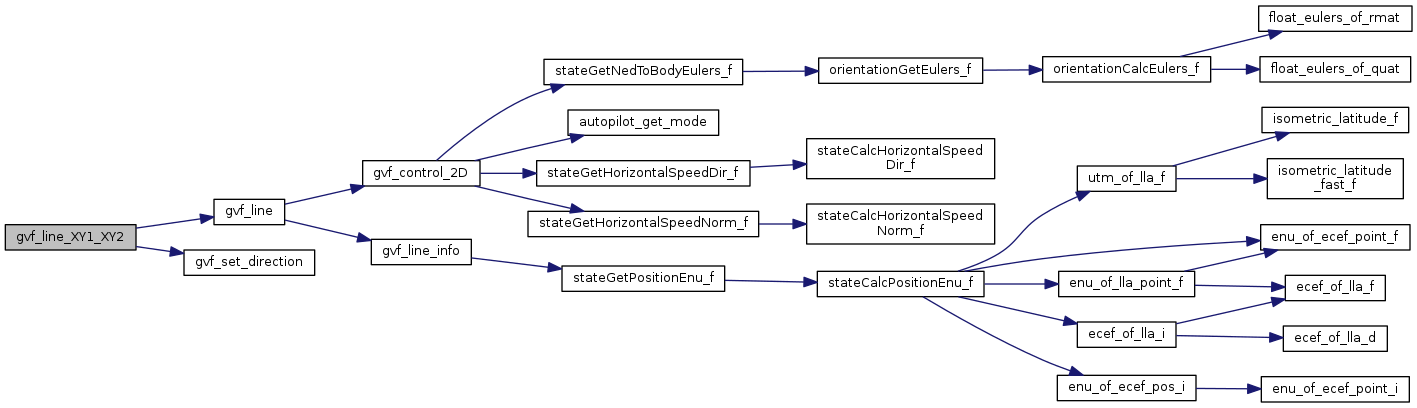
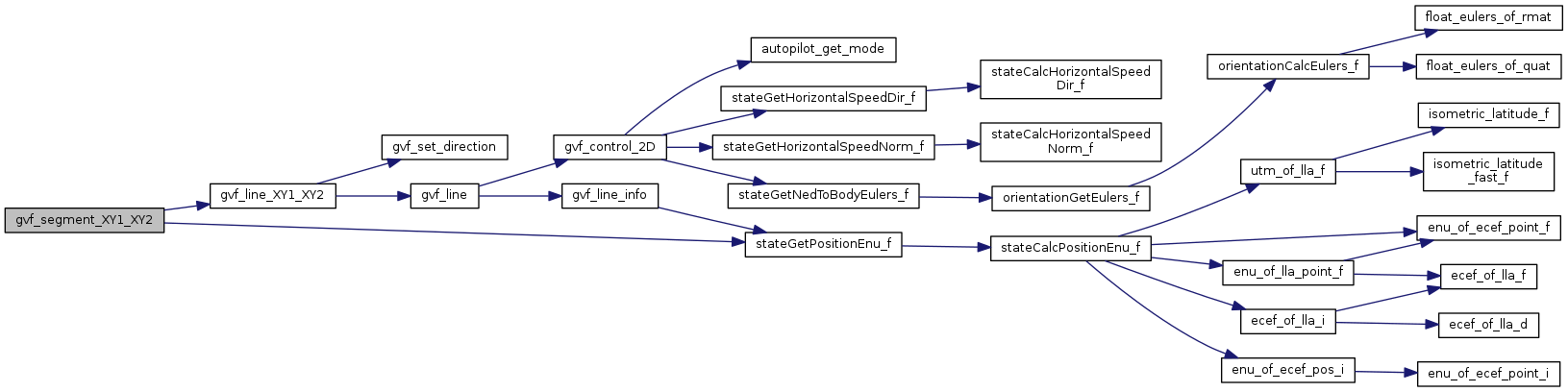
| bool gvf_line_XY1_XY2 | ( | float | x1, |
| float | y1, | ||
| float | x2, | ||
| float | y2 | ||
| ) |
Definition at line 240 of file gvf.c.
References alpha, gvf_line(), gvf_set_direction(), horizontal_mode, HORIZONTAL_MODE_ROUTE, gvf_seg::seg, gvf_seg::x1, gvf_seg::x2, gvf_seg::y1, and gvf_seg::y2.
Referenced by gvf_line_wp1_wp2(), and gvf_segment_XY1_XY2().
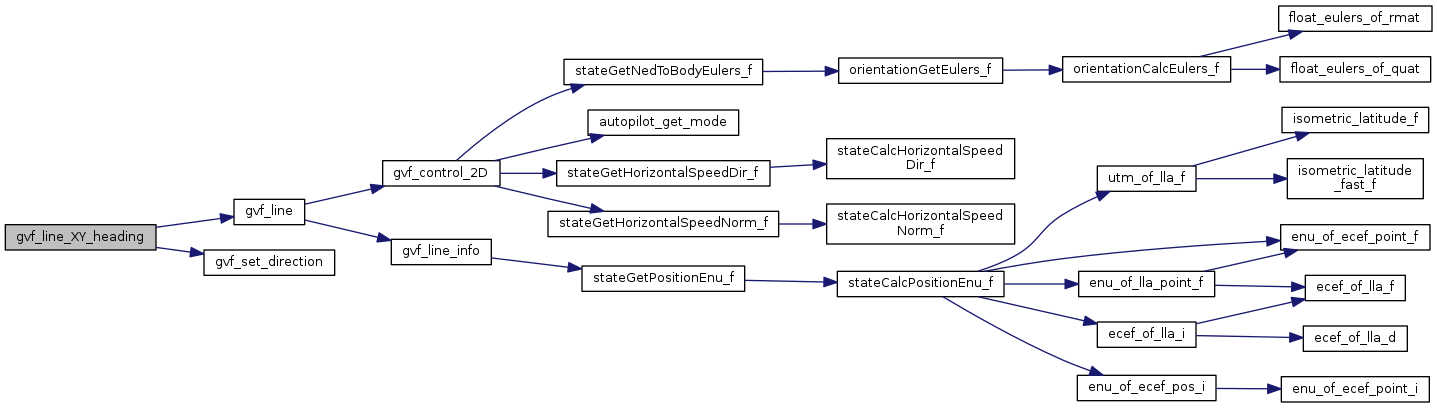
Here is the call graph for this function: Here is the caller graph for this function:| bool gvf_line_XY_heading | ( | float | x, |
| float | y, | ||
| float | heading | ||
| ) |
Definition at line 233 of file gvf.c.
References gvf_line(), and gvf_set_direction().
Referenced by gvf_line_wp_heading().
Here is the call graph for this function: Here is the caller graph for this function:| bool gvf_segment_loop_XY1_XY2 | ( | float | x1, |
| float | y1, | ||
| float | x2, | ||
| float | y2, | ||
| float | d1, | ||
| float | d2 | ||
| ) |
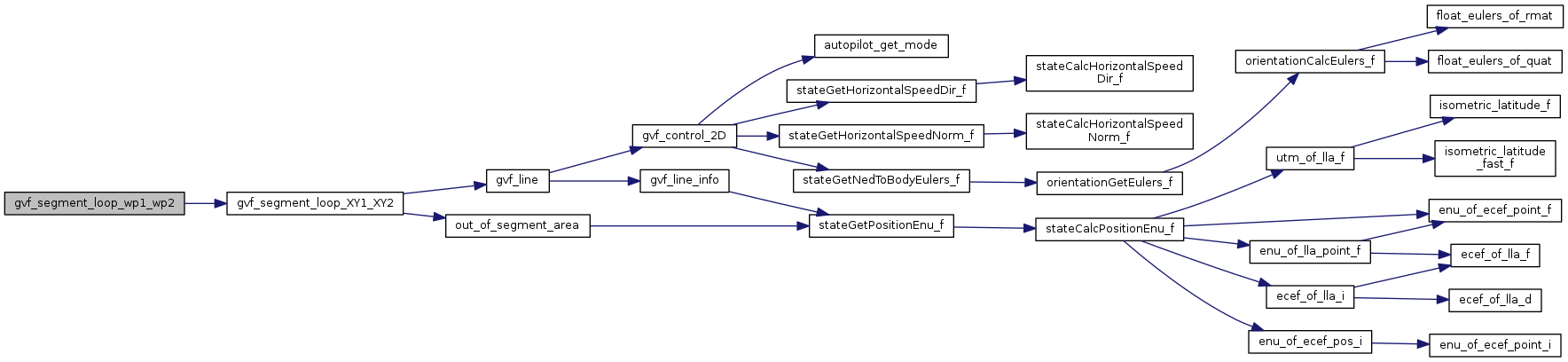
Definition at line 279 of file gvf.c.
References alpha, gvf_line(), horizontal_mode, HORIZONTAL_MODE_ROUTE, out_of_segment_area(), gvf_con::s, gvf_seg::seg, gvf_seg::x1, gvf_seg::x2, gvf_seg::y1, and gvf_seg::y2.
Referenced by gvf_segment_loop_wp1_wp2().
Here is the call graph for this function: Here is the caller graph for this function:| bool gvf_segment_XY1_XY2 | ( | float | x1, |
| float | y1, | ||
| float | x2, | ||
| float | y2 | ||
| ) |
Definition at line 312 of file gvf.c.
References gvf_line_XY1_XY2(), p, stateGetPositionEnu_f(), EnuCoor_f::x, and EnuCoor_f::y.
Referenced by gvf_nav_points(), and gvf_segment_wp1_wp2().
Here is the call graph for this function: Here is the caller graph for this function:| void gvf_set_direction | ( | int8_t | s | ) |
Definition at line 205 of file gvf.c.
References gvf_con::s.
Referenced by gvf_line_XY1_XY2(), gvf_line_XY_heading(), and gvf_nav_direction_circle().
Here is the caller graph for this function:| bool gvf_sin_wp_alpha | ( | uint8_t | wp, |
| float | alpha, | ||
| float | w, | ||
| float | off, | ||
| float | A | ||
| ) |
| bool gvf_sin_XY_alpha | ( | float | x, |
| float | y, | ||
| float | alpha, | ||
| float | w, | ||
| float | off, | ||
| float | A | ||
| ) |
Definition at line 400 of file gvf.c.
References A, alpha, gvf_con::error, gvf_control_2D(), gvf_sin_info(), gvf_sin_par, gvf_con::ke, gvf_s_par::ke, gvf_s_par::kn, gvf_tra::p, and gvf_tra::type.
Referenced by gvf_sin_wp1_wp2(), and gvf_sin_wp_alpha().
Here is the call graph for this function: Here is the caller graph for this function:| gvf_con gvf_control |
Definition at line 37 of file gvf.c.
Referenced by distributed_circular().
| gvf_tra gvf_trajectory |
Definition at line 40 of file gvf.c.
Referenced by gvf_ellipse_info(), gvf_line_info(), and gvf_sin_info().
 1.8.8
1.8.8