|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | decawave_anchorless_communication_init (void) |
| Initialization functio. More... | |
| void | decawave_anchorless_communication_periodic (void) |
| This function periodically sends state data over the serial (which is received by the arduino) More... | |
| void | decawave_anchorless_communication_event (void) |
| Event function currently checks for serial data and whether an update of states is available for a distant drone. More... | |
| void decawave_anchorless_communication_event | ( | void | ) |
Event function currently checks for serial data and whether an update of states is available for a distant drone.
If these cases are true, then actions are taken.
Definition at line 298 of file decawave_anchorless_communication.c.
References checkStatesUpdated(), and getSerialData().
Here is the call graph for this function:| void decawave_anchorless_communication_init | ( | void | ) |
Initialization functio.
Definition at line 272 of file decawave_anchorless_communication.c.
References setNodeStatesFalse(), and UWB_SERIAL_COMM_DIST_NUM_NODES.
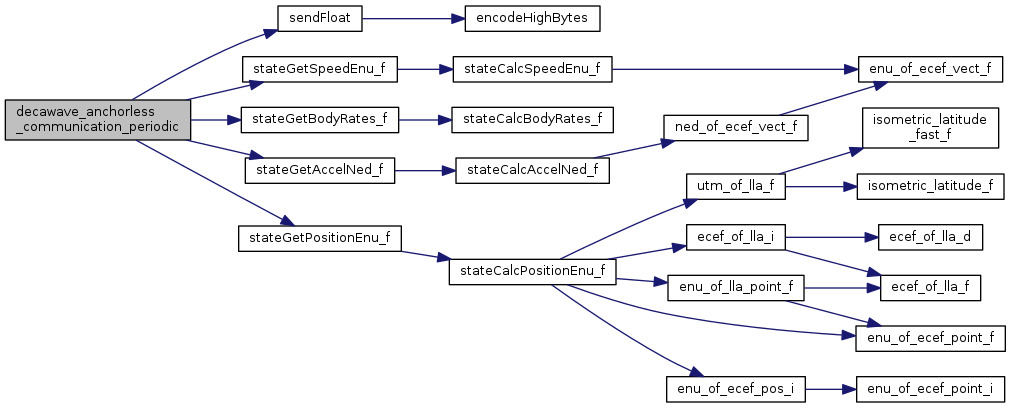
Here is the call graph for this function:| void decawave_anchorless_communication_periodic | ( | void | ) |
This function periodically sends state data over the serial (which is received by the arduino)
Definition at line 283 of file decawave_anchorless_communication.c.
References nodeState::r, sendFloat(), stateGetAccelNed_f(), stateGetBodyRates_f(), stateGetPositionEnu_f(), stateGetSpeedEnu_f(), UWB_SERIAL_COMM_AX, UWB_SERIAL_COMM_AY, UWB_SERIAL_COMM_VX, UWB_SERIAL_COMM_VY, UWB_SERIAL_COMM_YAWR, UWB_SERIAL_COMM_Z, and nodeState::z.
Here is the call graph for this function: 1.8.8
1.8.8