|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
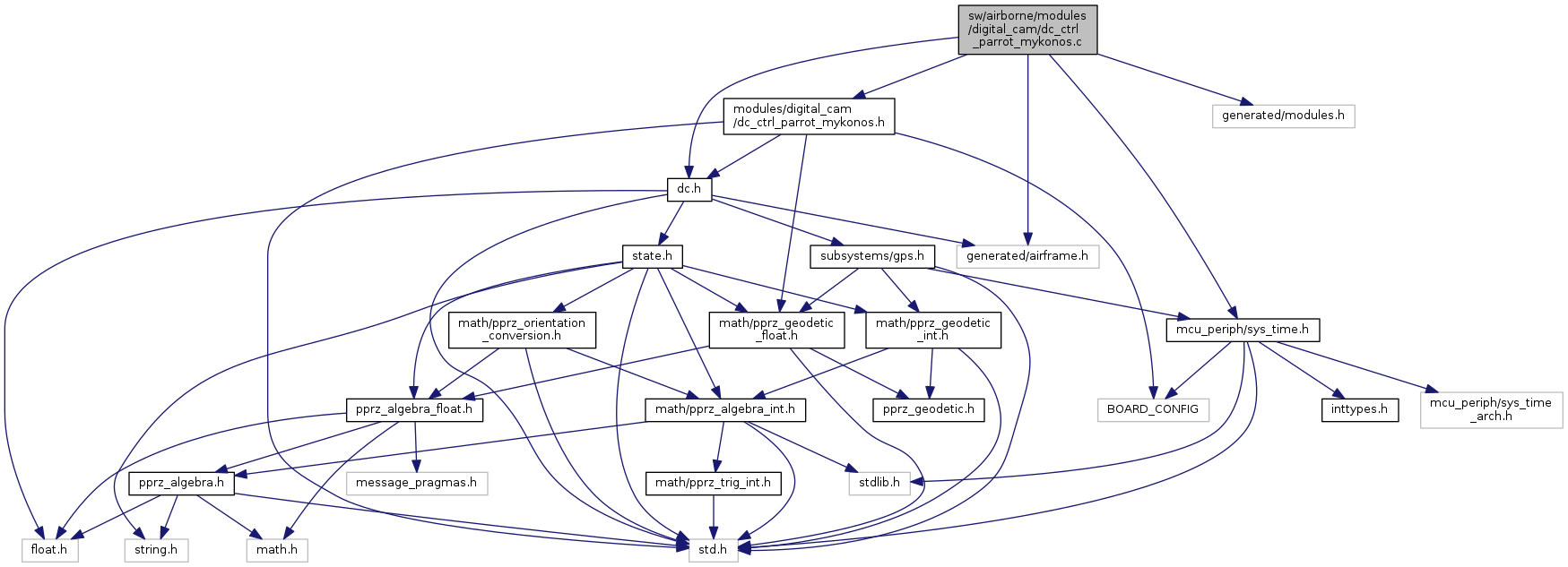
#include "modules/digital_cam/dc_ctrl_parrot_mykonos.h"#include "generated/modules.h"#include "generated/airframe.h"#include "mcu_periph/sys_time.h"#include "modules/digital_cam/dc.h" Include dependency graph for dc_ctrl_parrot_mykonos.c:
Include dependency graph for dc_ctrl_parrot_mykonos.c:Go to the source code of this file.
Macros | |
| #define | DC_CTRL_PARROT_MYKONOS_RECORD_DELAY 0.05 |
| NOTES: For now only the front cam is used, feel free to extend. More... | |
| #define | DC_CTRL_PARROT_MYKONOS_LOG_DELAY 50 |
| delay in milli-seconds before logging after a shot in ms More... | |
| #define | DC_CTRL_PARROT_MYKONOS_TIMER_OF_DELAY(_delay) ((uint32_t)(_delay * DC_CTRL_PARROT_MYKONOS_PERIODIC_FREQ)) |
| Get timer from delay based on periodic freq from modules.h. More... | |
| #define | DC_CTRL_PARROT_MYKONOS_AUTOSHOOT_DELAY 5.0 |
| autoshoot timer delay based on periodic freq from modules.h More... | |
| #define | DC_CTRL_PARROT_MYKONOS_AUTOSHOOT_TIMER_OF_DELAY(_delay) ((uint32_t)(_delay * DC_CTRL_PARROT_MYKONOS_AUTOSHOOT_FREQ)) |
Functions | |
| void | dc_ctrl_parrot_mykonos_init (void) |
| void | dc_ctrl_parrot_mykonos_periodic (void) |
| void | dc_ctrl_parrot_mykonos_command (enum dc_ctrl_parrot_mykonos_status cmd) |
| void | dc_ctrl_parrot_mykonos_autoshoot (void) |
| void | dc_ctrl_parrot_mykonos_autoshoot_start (void) |
Variables | |
| struct Dc_Ctrl_Parrot_Mykonos | dc_ctrl_parrot_mykonos |
| Send report. More... | |
| #define DC_CTRL_PARROT_MYKONOS_AUTOSHOOT_DELAY 5.0 |
autoshoot timer delay based on periodic freq from modules.h
Definition at line 47 of file dc_ctrl_parrot_mykonos.c.
Referenced by dc_ctrl_parrot_mykonos_autoshoot().
| #define DC_CTRL_PARROT_MYKONOS_AUTOSHOOT_TIMER_OF_DELAY | ( | _delay | ) | ((uint32_t)(_delay * DC_CTRL_PARROT_MYKONOS_AUTOSHOOT_FREQ)) |
Definition at line 49 of file dc_ctrl_parrot_mykonos.c.
Referenced by dc_ctrl_parrot_mykonos_autoshoot().
| #define DC_CTRL_PARROT_MYKONOS_LOG_DELAY 50 |
delay in milli-seconds before logging after a shot in ms
Definition at line 40 of file dc_ctrl_parrot_mykonos.c.
Referenced by dc_ctrl_parrot_mykonos_command().
| #define DC_CTRL_PARROT_MYKONOS_RECORD_DELAY 0.05 |
NOTES: For now only the front cam is used, feel free to extend.
Reason is that bottom_cam is normally in use for mapping or Optic flow and the like. See: https://github.com/Parrot-Developers/disco-opensource/Time in seconds to start/stop recording or take a picture
Definition at line 37 of file dc_ctrl_parrot_mykonos.c.
Referenced by dc_ctrl_parrot_mykonos_command().
| #define DC_CTRL_PARROT_MYKONOS_TIMER_OF_DELAY | ( | _delay | ) | ((uint32_t)(_delay * DC_CTRL_PARROT_MYKONOS_PERIODIC_FREQ)) |
Get timer from delay based on periodic freq from modules.h.
Definition at line 43 of file dc_ctrl_parrot_mykonos.c.
Referenced by dc_ctrl_parrot_mykonos_command().
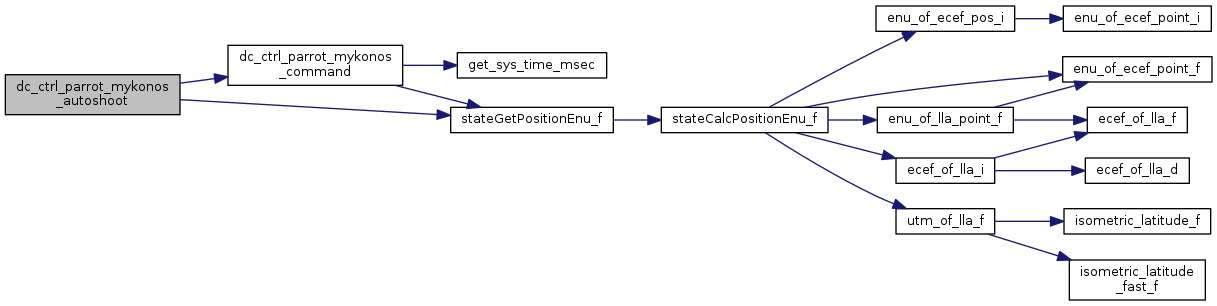
| void dc_ctrl_parrot_mykonos_autoshoot | ( | void | ) |
Definition at line 283 of file dc_ctrl_parrot_mykonos.c.
References Dc_Ctrl_Parrot_Mykonos::autoshoot, dc_ctrl_parrot_mykonos, DC_CTRL_PARROT_MYKONOS_AUTOSHOOT_DELAY, DC_CTRL_PARROT_MYKONOS_AUTOSHOOT_START, DC_CTRL_PARROT_MYKONOS_AUTOSHOOT_TIMER_OF_DELAY, dc_ctrl_parrot_mykonos_command(), DC_CTRL_PARROT_MYKONOS_SHOOT, Dc_Ctrl_Parrot_Mykonos::last_shot_pos, stateGetPositionEnu_f(), Dc_Ctrl_Parrot_Mykonos::status, VECT2_NORM2, FloatVect2::x, EnuCoor_f::x, FloatVect2::y, and EnuCoor_f::y.
Here is the call graph for this function:| void dc_ctrl_parrot_mykonos_autoshoot_start | ( | void | ) |
Definition at line 309 of file dc_ctrl_parrot_mykonos.c.
References Dc_Ctrl_Parrot_Mykonos::autoshoot, dc_ctrl_parrot_mykonos, DC_CTRL_PARROT_MYKONOS_AUTOSHOOT_START, and Dc_Ctrl_Parrot_Mykonos::status.
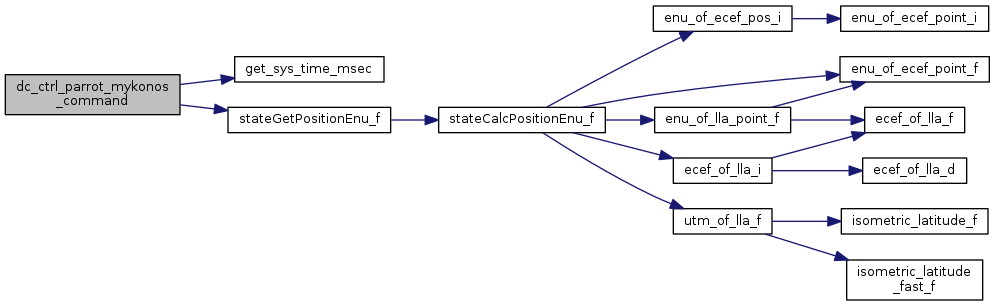
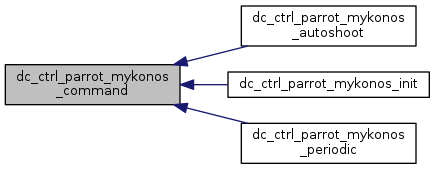
| void dc_ctrl_parrot_mykonos_command | ( | enum dc_ctrl_parrot_mykonos_status | cmd | ) |
Definition at line 209 of file dc_ctrl_parrot_mykonos.c.
References dc_ctrl_parrot_mykonos, DC_CTRL_PARROT_MYKONOS_AUTOSHOOT_START, DC_CTRL_PARROT_MYKONOS_AUTOSHOOT_STOP, DC_CTRL_PARROT_MYKONOS_LOG_DELAY, DC_CTRL_PARROT_MYKONOS_RECORD_DELAY, DC_CTRL_PARROT_MYKONOS_RECORD_START, DC_CTRL_PARROT_MYKONOS_RECORD_STOP, DC_CTRL_PARROT_MYKONOS_SHOOT, DC_CTRL_PARROT_MYKONOS_STREAM_START, DC_CTRL_PARROT_MYKONOS_STREAM_STOP, DC_CTRL_PARROT_MYKONOS_TIMER_OF_DELAY, get_sys_time_msec(), Dc_Ctrl_Parrot_Mykonos::last_shot_pos, Dc_Ctrl_Parrot_Mykonos::log_delay, stateGetPositionEnu_f(), Dc_Ctrl_Parrot_Mykonos::status, and Dc_Ctrl_Parrot_Mykonos::timer.
Referenced by dc_ctrl_parrot_mykonos_autoshoot(), dc_ctrl_parrot_mykonos_init(), and dc_ctrl_parrot_mykonos_periodic().
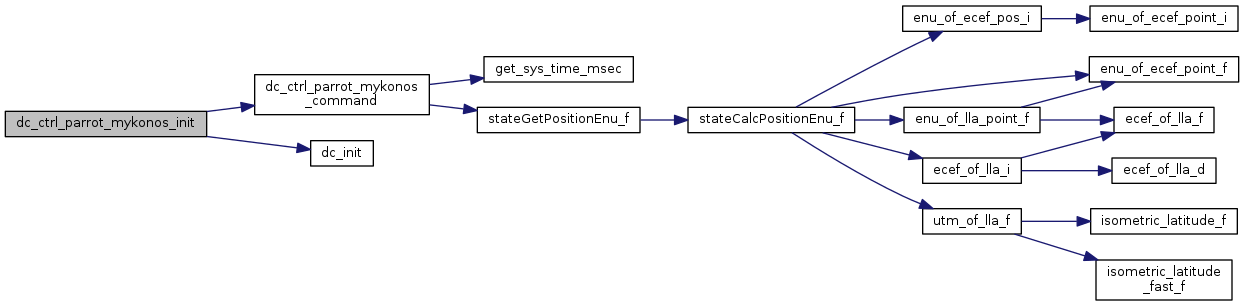
Here is the call graph for this function: Here is the caller graph for this function:| void dc_ctrl_parrot_mykonos_init | ( | void | ) |
Definition at line 117 of file dc_ctrl_parrot_mykonos.c.
References Dc_Ctrl_Parrot_Mykonos::autoshoot, dc_ctrl_parrot_mykonos, dc_ctrl_parrot_mykonos_command(), DC_CTRL_PARROT_MYKONOS_NONE, DC_CTRL_PARROT_MYKONOS_STREAM_START, dc_init(), Dc_Ctrl_Parrot_Mykonos::log_delay, Dc_Ctrl_Parrot_Mykonos::photo_nr, Dc_Ctrl_Parrot_Mykonos::status, and Dc_Ctrl_Parrot_Mykonos::timer.
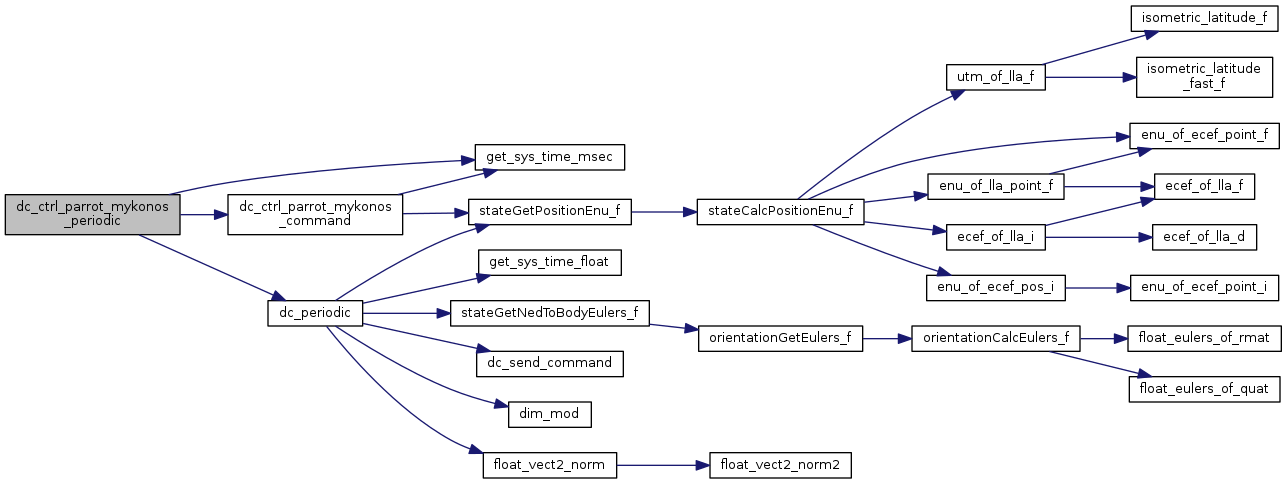
Here is the call graph for this function:| void dc_ctrl_parrot_mykonos_periodic | ( | void | ) |
Definition at line 151 of file dc_ctrl_parrot_mykonos.c.
References dc_ctrl_parrot_mykonos, dc_ctrl_parrot_mykonos_command(), DC_CTRL_PARROT_MYKONOS_SHOOT, dc_periodic(), get_sys_time_msec(), Dc_Ctrl_Parrot_Mykonos::log_delay, Dc_Ctrl_Parrot_Mykonos::photo_nr, and Dc_Ctrl_Parrot_Mykonos::timer.
Here is the call graph for this function:| struct Dc_Ctrl_Parrot_Mykonos dc_ctrl_parrot_mykonos |
Send report.
Definition at line 115 of file dc_ctrl_parrot_mykonos.c.
Referenced by dc_ctrl_parrot_mykonos_autoshoot(), dc_ctrl_parrot_mykonos_autoshoot_start(), dc_ctrl_parrot_mykonos_command(), dc_ctrl_parrot_mykonos_init(), and dc_ctrl_parrot_mykonos_periodic().
 1.8.8
1.8.8