|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
Actuator driver for the swing. More...
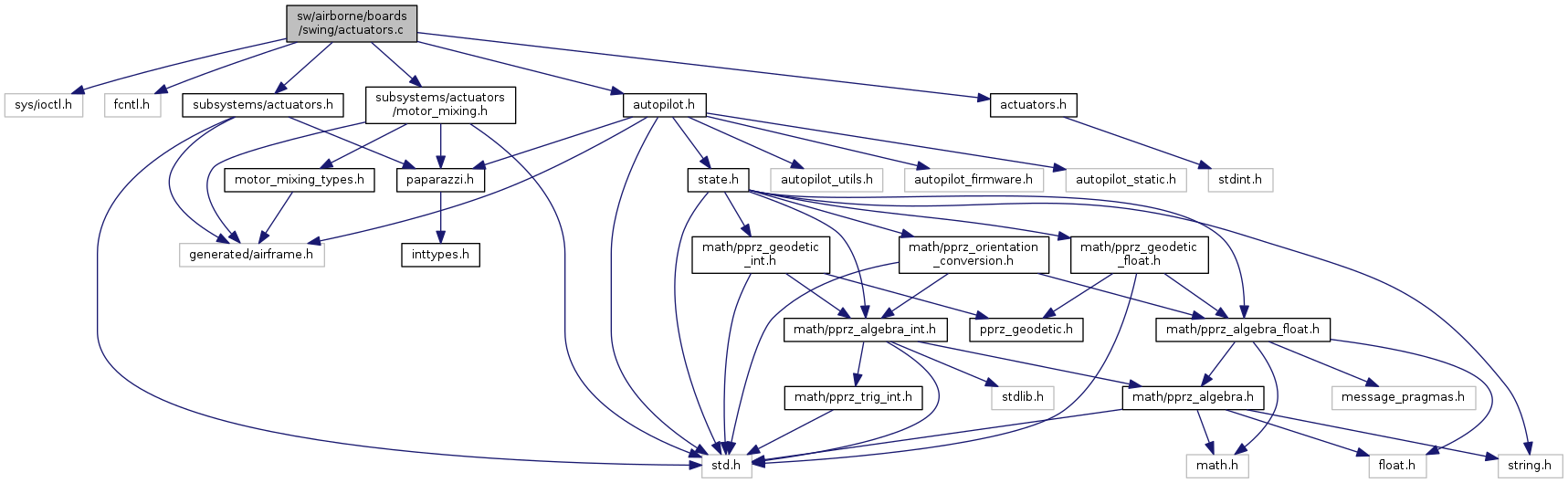
#include <sys/ioctl.h>#include <fcntl.h>#include "subsystems/actuators.h"#include "subsystems/actuators/motor_mixing.h"#include "actuators.h"#include "autopilot.h" Include dependency graph for actuators.c:
Include dependency graph for actuators.c:Go to the source code of this file.
Data Structures | |
| struct | pwm_delos_quadruplet |
Macros | |
| #define | PWM_MAGIC 'p' |
| #define | PWM_DELOS_SET_RATIOS _IOR(PWM_MAGIC, 9, pwm_delos_quadruplet*) |
| #define | PWM_DELOS_SET_SPEEDS _IOR(PWM_MAGIC, 10, pwm_delos_quadruplet*) |
| #define | PWM_DELOS_SET_CTRL _IOR(PWM_MAGIC, 11, unsigned int) |
| #define | PWM_DELOS_REQUEST _IO(PWM_MAGIC, 12) |
| #define | PWM_NB_BITS (9) |
| #define | PWM_TOTAL_RANGE (1<<PWM_NB_BITS) |
| #define | PWM_REG_RATIO_PRECISION_MASK (PWM_NB_BITS<<16) |
| #define | PWM_REG_SATURATION (PWM_REG_RATIO_PRECISION_MASK|PWM_TOTAL_RANGE) |
Enumerations | |
| enum | { SiP6_PWM0_START = (1<<0), SiP6_PWM1_START = (1<<1), SiP6_PWM2_START = (1<<2), SiP6_PWM3_START = (1<<3) } |
Functions | |
| void | actuators_swing_init (void) |
| void | actuators_swing_commit (void) |
Variables | |
| struct ActuatorsSwing | actuators_swing |
| static int | actuators_fd |
Actuator driver for the swing.
Definition in file actuators.c.
| struct pwm_delos_quadruplet |
Definition at line 34 of file actuators.c.
| Data Fields | ||
|---|---|---|
| unsigned int | val[4] | |
| #define PWM_DELOS_REQUEST _IO(PWM_MAGIC, 12) |
Definition at line 38 of file actuators.c.
| #define PWM_DELOS_SET_CTRL _IOR(PWM_MAGIC, 11, unsigned int) |
Definition at line 37 of file actuators.c.
Referenced by actuators_swing_init().
| #define PWM_DELOS_SET_RATIOS _IOR(PWM_MAGIC, 9, pwm_delos_quadruplet*) |
Definition at line 35 of file actuators.c.
Referenced by actuators_swing_commit().
| #define PWM_DELOS_SET_SPEEDS _IOR(PWM_MAGIC, 10, pwm_delos_quadruplet*) |
Definition at line 36 of file actuators.c.
Referenced by actuators_swing_init().
| #define PWM_MAGIC 'p' |
Definition at line 33 of file actuators.c.
| #define PWM_NB_BITS (9) |
Definition at line 40 of file actuators.c.
| #define PWM_REG_RATIO_PRECISION_MASK (PWM_NB_BITS<<16) |
Definition at line 47 of file actuators.c.
Referenced by actuators_swing_commit().
| #define PWM_REG_SATURATION (PWM_REG_RATIO_PRECISION_MASK|PWM_TOTAL_RANGE) |
Definition at line 48 of file actuators.c.
Referenced by actuators_swing_commit().
| #define PWM_TOTAL_RANGE (1<<PWM_NB_BITS) |
Definition at line 44 of file actuators.c.
Referenced by actuators_swing_commit().
| anonymous enum |
| Enumerator | |
|---|---|
| SiP6_PWM0_START | |
| SiP6_PWM1_START | |
| SiP6_PWM2_START | |
| SiP6_PWM3_START | |
Definition at line 59 of file actuators.c.
| void actuators_swing_commit | ( | void | ) |
Definition at line 86 of file actuators.c.
References actuators_swing, PWM_DELOS_SET_RATIOS, PWM_REG_RATIO_PRECISION_MASK, PWM_REG_SATURATION, PWM_TOTAL_RANGE, ActuatorsSwing::rpm_ref, and pwm_delos_quadruplet::val.
Referenced by actuators_swing_init().
Here is the caller graph for this function:| void actuators_swing_init | ( | void | ) |
Definition at line 66 of file actuators.c.
References actuators_swing_commit(), PWM_DELOS_SET_CTRL, PWM_DELOS_SET_SPEEDS, SiP6_PWM0_START, SiP6_PWM1_START, SiP6_PWM2_START, and SiP6_PWM3_START.
Here is the call graph for this function:
|
static |
Definition at line 56 of file actuators.c.
| struct ActuatorsSwing actuators_swing |
Definition at line 55 of file actuators.c.
Referenced by actuators_swing_commit().
 1.8.8
1.8.8