|
Paparazzi UAS
v6.2.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v6.2.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
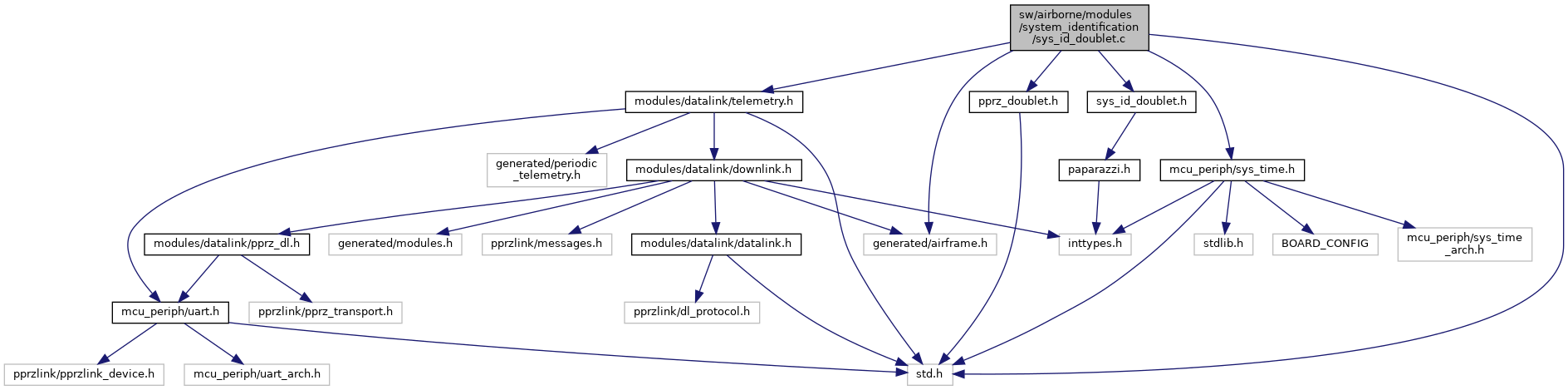
#include "std.h"#include "sys_id_doublet.h"#include "pprz_doublet.h"#include "modules/datalink/telemetry.h"#include "generated/airframe.h"#include "mcu_periph/sys_time.h" Include dependency graph for sys_id_doublet.c:
Include dependency graph for sys_id_doublet.c:Go to the source code of this file.
Macros | |
| #define | DOUBLET_AXES {COMMAND_ROLL,COMMAND_PITCH,COMMAND_YAW,COMMAND_THRUST} |
| #define | DOUBLET_ENABLED TRUE |
| #define | DOUBLET_NB_AXES sizeof ACTIVE_DOUBLET_AXES / sizeof ACTIVE_DOUBLET_AXES[0] |
Functions | |
| static void | set_current_doublet_values (void) |
| static void | send_doublet (struct transport_tx *trans, struct link_device *dev) |
| static void | start_doublet (void) |
| static void | stop_doublet (void) |
| uint8_t | sys_id_doublet_running (void) |
| void | sys_id_doublet_activate_handler (uint8_t activate) |
| void | sys_id_doublet_axis_handler (uint8_t axis) |
| void | sys_id_doublet_mod3211_handler (uint8_t mode) |
| void | sys_id_doublet_init (void) |
| void | sys_id_doublet_run (void) |
| void | sys_id_doublet_add_values (bool motors_on, bool override_on, pprz_t in_cmd[]) |
Variables | |
| static struct doublet_t | doublet |
| uint8_t | doublet_active = false |
| uint8_t | doublet_mode_3211 = false |
| uint8_t | doublet_axis = 0 |
| pprz_t | doublet_amplitude = 4500 |
| float | doublet_length_s = 20.0f |
| float | doublet_extra_waiting_time_s = 0.0f |
| static const int8_t | ACTIVE_DOUBLET_AXES [] = DOUBLET_AXES |
| static pprz_t | current_doublet_values [DOUBLET_NB_AXES] |
This is the module implementation for the doublet maneuver. Use sys_id_chirp by adding the module to your airframe file and adding the following line to the top of the <command_laws> section of your airframe file:
<call fun="sys_id_doublet_add_values(autopilot_get_motors_on(),FALSE,values)">
In the GCS you can then start and stop the doublet, change type of doublet maneuvre. Documentation of the specific options can be found in the module xml file.
Definition in file sys_id_doublet.c.
| #define DOUBLET_AXES {COMMAND_ROLL,COMMAND_PITCH,COMMAND_YAW,COMMAND_THRUST} |
Definition at line 44 of file sys_id_doublet.c.
| #define DOUBLET_ENABLED TRUE |
Definition at line 48 of file sys_id_doublet.c.
| #define DOUBLET_NB_AXES sizeof ACTIVE_DOUBLET_AXES / sizeof ACTIVE_DOUBLET_AXES[0] |
Definition at line 67 of file sys_id_doublet.c.
|
static |
Definition at line 83 of file sys_id_doublet.c.
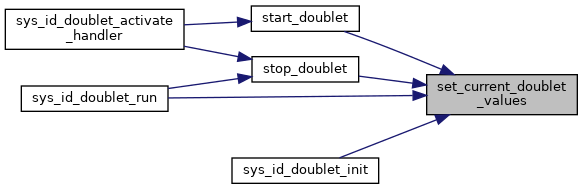
References current_doublet_values, dev, doublet_active, doublet_amplitude, doublet_axis, and doublet_mode_3211.
Referenced by sys_id_doublet_init().
Here is the caller graph for this function:
|
static |
Definition at line 71 of file sys_id_doublet.c.
References current_doublet_values, doublet_t::current_value, doublet, doublet_active, doublet_amplitude, doublet_axis, and DOUBLET_NB_AXES.
Referenced by start_doublet(), stop_doublet(), sys_id_doublet_init(), and sys_id_doublet_run().
Here is the caller graph for this function:
|
static |
Definition at line 89 of file sys_id_doublet.c.
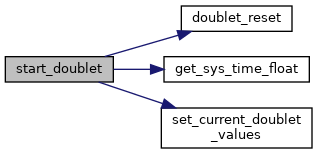
References doublet, doublet_active, doublet_reset(), get_sys_time_float(), and set_current_doublet_values().
Referenced by sys_id_doublet_activate_handler().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 96 of file sys_id_doublet.c.
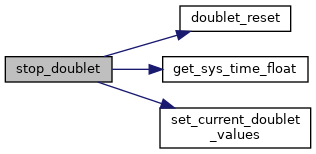
References doublet, doublet_active, doublet_reset(), get_sys_time_float(), and set_current_doublet_values().
Referenced by sys_id_doublet_activate_handler(), and sys_id_doublet_run().
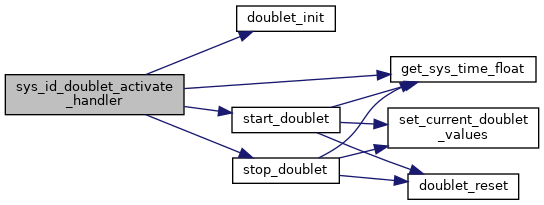
Here is the call graph for this function: Here is the caller graph for this function:| void sys_id_doublet_activate_handler | ( | uint8_t | activate | ) |
Definition at line 107 of file sys_id_doublet.c.
References doublet, doublet_active, doublet_extra_waiting_time_s, doublet_init(), doublet_length_s, doublet_mode_3211, get_sys_time_float(), start_doublet(), and stop_doublet().
Here is the call graph for this function:| void sys_id_doublet_add_values | ( | bool | motors_on, |
| bool | override_on, | ||
| pprz_t | in_cmd[] | ||
| ) |
Definition at line 155 of file sys_id_doublet.c.
References ACTIVE_DOUBLET_AXES, current_doublet_values, DOUBLET_NB_AXES, and MAX_PPRZ.
| void sys_id_doublet_axis_handler | ( | uint8_t | axis | ) |
Definition at line 118 of file sys_id_doublet.c.
References doublet_axis, and DOUBLET_NB_AXES.
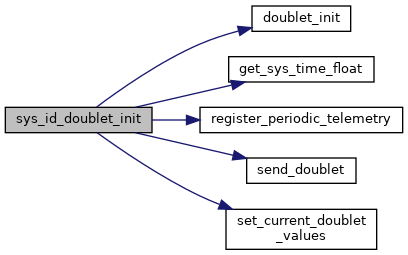
| void sys_id_doublet_init | ( | void | ) |
Definition at line 129 of file sys_id_doublet.c.
References current_doublet_values, DefaultPeriodic, doublet, doublet_extra_waiting_time_s, doublet_init(), doublet_length_s, doublet_mode_3211, DOUBLET_NB_AXES, get_sys_time_float(), register_periodic_telemetry(), send_doublet(), and set_current_doublet_values().
Here is the call graph for this function:| void sys_id_doublet_mod3211_handler | ( | uint8_t | mode | ) |
Definition at line 125 of file sys_id_doublet.c.
References doublet_mode_3211, and mode.
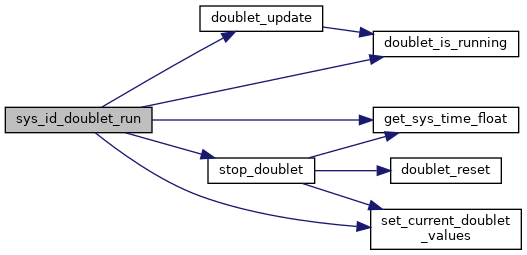
| void sys_id_doublet_run | ( | void | ) |
Definition at line 141 of file sys_id_doublet.c.
References doublet, doublet_active, doublet_is_running(), doublet_update(), get_sys_time_float(), set_current_doublet_values(), and stop_doublet().
Here is the call graph for this function:| uint8_t sys_id_doublet_running | ( | void | ) |
Definition at line 103 of file sys_id_doublet.c.
References doublet_active.
|
static |
Definition at line 66 of file sys_id_doublet.c.
Referenced by sys_id_doublet_add_values().
|
static |
Definition at line 69 of file sys_id_doublet.c.
Referenced by send_doublet(), set_current_doublet_values(), sys_id_doublet_add_values(), and sys_id_doublet_init().
|
static |
Definition at line 1 of file sys_id_doublet.c.
Referenced by doublet_init(), doublet_is_running(), doublet_reset(), doublet_update(), set_current_doublet_values(), start_doublet(), stop_doublet(), sys_id_doublet_activate_handler(), sys_id_doublet_init(), and sys_id_doublet_run().
Definition at line 55 of file sys_id_doublet.c.
Referenced by send_doublet(), set_current_doublet_values(), start_doublet(), stop_doublet(), sys_id_doublet_activate_handler(), sys_id_doublet_run(), and sys_id_doublet_running().
| pprz_t doublet_amplitude = 4500 |
Definition at line 60 of file sys_id_doublet.c.
Referenced by send_doublet(), and set_current_doublet_values().
| uint8_t doublet_axis = 0 |
Definition at line 58 of file sys_id_doublet.c.
Referenced by send_doublet(), set_current_doublet_values(), and sys_id_doublet_axis_handler().
| float doublet_extra_waiting_time_s = 0.0f |
Definition at line 62 of file sys_id_doublet.c.
Referenced by sys_id_doublet_activate_handler(), and sys_id_doublet_init().
| float doublet_length_s = 20.0f |
Definition at line 61 of file sys_id_doublet.c.
Referenced by sys_id_doublet_activate_handler(), and sys_id_doublet_init().
Definition at line 56 of file sys_id_doublet.c.
Referenced by send_doublet(), sys_id_doublet_activate_handler(), sys_id_doublet_init(), and sys_id_doublet_mod3211_handler().