|
Paparazzi UAS
v6.2.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v6.2.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
#include <stdio.h>#include <assert.h>#include <sys/time.h>#include <sys/stat.h>#include <time.h>#include <string.h>#include "std.h"#include "main_ap.h"#include "autopilot.h"#include "modules/gps/gps.h"#include "generated/settings.h"#include "firmwares/fixedwing/nav.h"#include "firmwares/fixedwing/stabilization/stabilization_attitude.h"#include "firmwares/fixedwing/guidance/guidance_v.h"#include "modules/core/commands.h"#include "modules/datalink/datalink.h"#include "modules/datalink/telemetry.h"#include "generated/flight_plan.h"#include "generated/modules.h"#include <caml/mlvalues.h>#include <caml/memory.h> Include dependency graph for sim_ap.c:
Include dependency graph for sim_ap.c:Go to the source code of this file.
Macros | |
| #define | SIM_UPDATE_DL TRUE |
Functions | |
| value | sim_sys_time_task (value unit) |
| needs to be called at SYS_TIME_FREQUENCY More... | |
| value | sim_periodic_task (value unit) |
| float | ftimeofday (void) |
| value | sim_init (value unit) |
| value | update_bat (value bat) |
| value | update_dl_status (value dl_enabled) |
| value | get_commands (value val_commands) |
| value | set_datalink_message (value s) |
Variables | |
| uint8_t | ir_estim_mode |
| uint8_t | vertical_mode |
| uint8_t | inflight_calib_mode |
| bool | rc_event_1 |
| bool | rc_event_2 |
| uint8_t | gps_nb_ovrn |
| uint8_t | link_fbw_fbw_nb_err |
| uint8_t | link_fbw_nb_err |
| float | alt_roll_pgain |
| float | roll_rate_pgain |
| uint8_t | ac_id |
| value get_commands | ( | value | val_commands | ) |
| value set_datalink_message | ( | value | s | ) |
Definition at line 107 of file sim_ap.c.
References dl_buffer, dl_msg_available, DlCheckAndParse(), DOWNLINK_DEVICE, ivy_tp, MSG_SIZE, s, and SIM_UPDATE_DL.
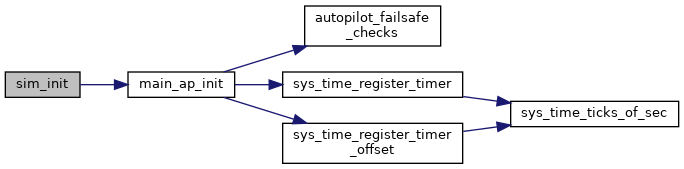
Here is the call graph for this function:| value sim_init | ( | value | unit | ) |
Definition at line 75 of file sim_ap.c.
References main_ap_init(), and unit.
Here is the call graph for this function:| value sim_periodic_task | ( | value | unit | ) |
Definition at line 60 of file sim_ap.c.
References main_ap_event(), main_ap_periodic(), and unit.
Here is the call graph for this function:| value sim_sys_time_task | ( | value | unit | ) |
needs to be called at SYS_TIME_FREQUENCY
Definition at line 54 of file sim_ap.c.
References sys_tick_handler(), and unit.
Here is the call graph for this function:| value update_bat | ( | value | bat | ) |
Definition at line 83 of file sim_ap.c.
References electrical, and Electrical::vsupply.
| value update_dl_status | ( | value | dl_enabled | ) |
| uint8_t ac_id |
Definition at line 43 of file sim_ap.c.
Referenced by acInfoCalcPositionEnu_f(), acInfoCalcPositionEnu_i(), acInfoCalcPositionLla_f(), acInfoCalcPositionLla_i(), acInfoCalcPositionUtm_f(), acInfoCalcPositionUtm_i(), acInfoCalcVelocityEnu_f(), acInfoCalcVelocityEnu_i(), acInfoGetClimb(), acInfoGetCourse(), acInfoGetGspeed(), acInfoGetItow(), acInfoGetPositionEnu_f(), acInfoGetPositionEnu_i(), acInfoGetPositionLla_f(), acInfoGetPositionLla_i(), acInfoGetPositionUtm_f(), acInfoGetPositionUtm_i(), acInfoGetVelocityEnu_f(), acInfoGetVelocityEnu_i(), acInfoSetPositionEnu_f(), acInfoSetPositionEnu_i(), acInfoSetPositionLla_f(), acInfoSetPositionLla_i(), acInfoSetPositionUtm_f(), acInfoSetPositionUtm_i(), acInfoSetVelocityEnu_f(), acInfoSetVelocityEnu_i(), bluegiga_receive(), calculate_new_heading(), collective_tracking_control(), fc_read_msg(), formation_flight(), nav_parse_MOVE_WP(), parse_ctc_target_CleanTable(), parse_ctc_target_RegTable(), parseFormationSlot(), parseFormationStatus(), parseRegTable(), potential_task(), range_msg_callback(), start_formation(), stop_formation(), tcas_periodic_task_1Hz(), and windturbine_periodic().
| uint8_t vertical_mode |
Definition at line 32 of file sim_ap.c.
Referenced by guidance_v_from_nav(), nav_heli_spinup_run(), and nav_heli_spinup_setup().