|
Paparazzi UAS
v6.2.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v6.2.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
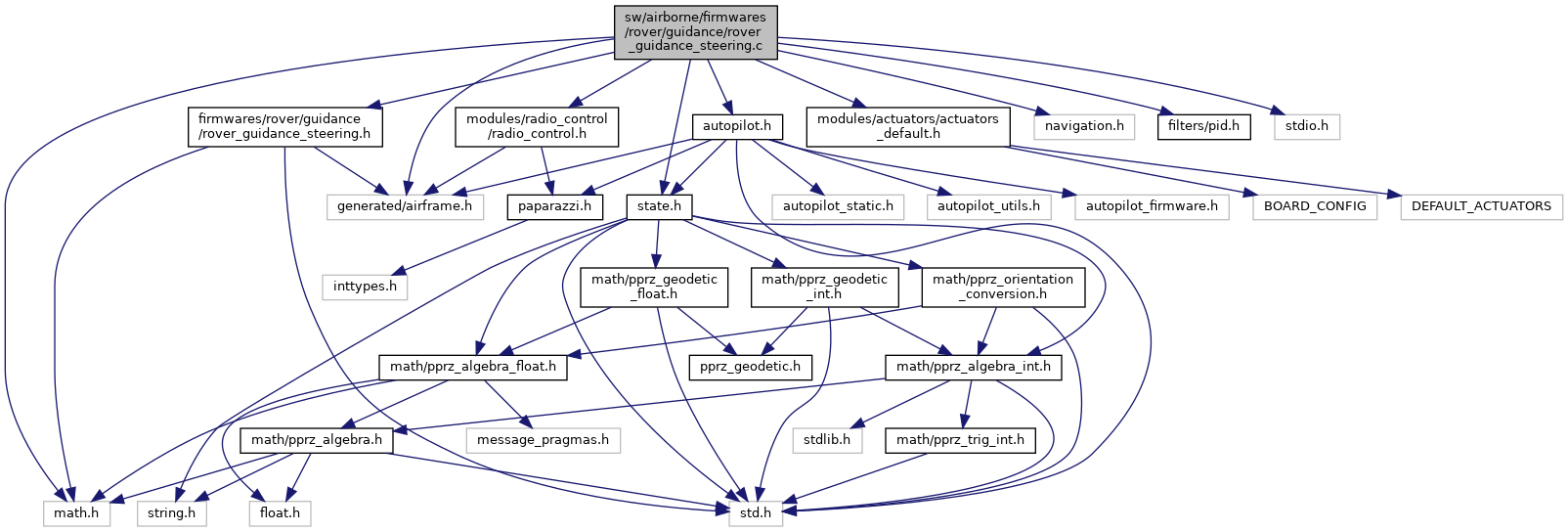
#include "firmwares/rover/guidance/rover_guidance_steering.h"#include "generated/airframe.h"#include "modules/actuators/actuators_default.h"#include "modules/radio_control/radio_control.h"#include "autopilot.h"#include "navigation.h"#include "state.h"#include "filters/pid.h"#include <math.h>#include <stdio.h> Include dependency graph for rover_guidance_steering.c:
Include dependency graph for rover_guidance_steering.c:Go to the source code of this file.
Macros | |
| #define | AUTOPILOT_CORE_GUIDANCE_C |
Functions | |
| void | rover_guidance_steering_init (void) |
| INIT function. More... | |
| void | rover_guidance_steering_heading_ctrl (float omega) |
| CTRL functions. More... | |
| void | rover_guidance_steering_speed_ctrl (void) |
| void | rover_guidance_steering_pid_reset (void) |
| PID RESET function. More... | |
| void | rover_guidance_steering_kill (void) |
Variables | |
| rover_ctrl | guidance_control |
| Mandatory dependencies header. More... | |
| static struct PID_f | rover_pid |
| static float | time_step |
| static float | last_speed_cmd |
| static uint8_t | last_ap_mode |
| #define AUTOPILOT_CORE_GUIDANCE_C |
Definition at line 22 of file rover_guidance_steering.c.
| void rover_guidance_steering_heading_ctrl | ( | float | omega | ) |
CTRL functions.
Definition at line 71 of file rover_guidance_steering.c.
References BoundDelta, BoundSpeed, rover_ctrl::cmd, sr_cmd_t::delta, DRIVE_SHAFT_DISTANCE, guidance_control, and stateGetHorizontalSpeedNorm_f().
Here is the call graph for this function:| void rover_guidance_steering_init | ( | void | ) |
INIT function.
Steering rover guidance EXT FUNCTIONS.
Definition at line 49 of file rover_guidance_steering.c.
References AP_MODE_KILL, rover_ctrl::cmd, sr_cmd_t::delta, guidance_control, init_pid_f(), rover_ctrl::kf, rover_ctrl::ki, rover_ctrl::kp, last_ap_mode, last_speed_cmd, MAX_PPRZ, rover_pid, sr_cmd_t::speed, rover_ctrl::speed_error, SR_MEASURED_KF, rover_ctrl::throttle, and time_step.
Here is the call graph for this function:| void rover_guidance_steering_kill | ( | void | ) |
Definition at line 114 of file rover_guidance_steering.c.
References rover_ctrl::cmd, sr_cmd_t::delta, guidance_control, and sr_cmd_t::speed.
| void rover_guidance_steering_pid_reset | ( | void | ) |
PID RESET function.
Definition at line 106 of file rover_guidance_steering.c.
References reset_pid_f(), rover_pid, and PID_f::sum.
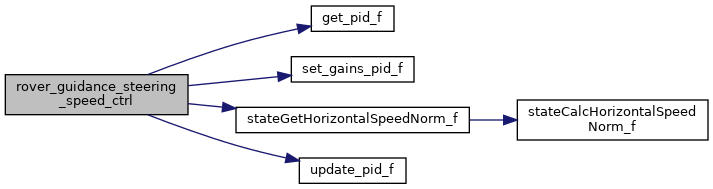
Here is the call graph for this function:| void rover_guidance_steering_speed_ctrl | ( | void | ) |
Definition at line 86 of file rover_guidance_steering.c.
References BoundThrottle, rover_ctrl::cmd, PID_f::g, get_pid_f(), guidance_control, rover_ctrl::kf, rover_ctrl::ki, rover_ctrl::kp, last_speed_cmd, rover_pid, set_gains_pid_f(), sr_cmd_t::speed, rover_ctrl::speed_error, stateGetHorizontalSpeedNorm_f(), rover_ctrl::throttle, time_step, and update_pid_f().
Here is the call graph for this function:| rover_ctrl guidance_control |
Mandatory dependencies header.
Definition at line 41 of file rover_guidance_steering.c.
Referenced by rover_guidance_steering_heading_ctrl(), rover_guidance_steering_init(), rover_guidance_steering_kill(), and rover_guidance_steering_speed_ctrl().
|
static |
Definition at line 46 of file rover_guidance_steering.c.
Referenced by rover_guidance_steering_init().
|
static |
Definition at line 45 of file rover_guidance_steering.c.
Referenced by rover_guidance_steering_init(), and rover_guidance_steering_speed_ctrl().
|
static |
Definition at line 41 of file rover_guidance_steering.c.
Referenced by rover_guidance_steering_init(), rover_guidance_steering_pid_reset(), and rover_guidance_steering_speed_ctrl().
|
static |
Definition at line 44 of file rover_guidance_steering.c.
Referenced by rover_guidance_steering_init(), and rover_guidance_steering_speed_ctrl().