|
Paparazzi UAS
v6.2.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v6.2.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | relative_localization_filter_init (void) |
| void | relative_localization_filter_periodic (void) |
Definition in file relative_localization_filter.h.
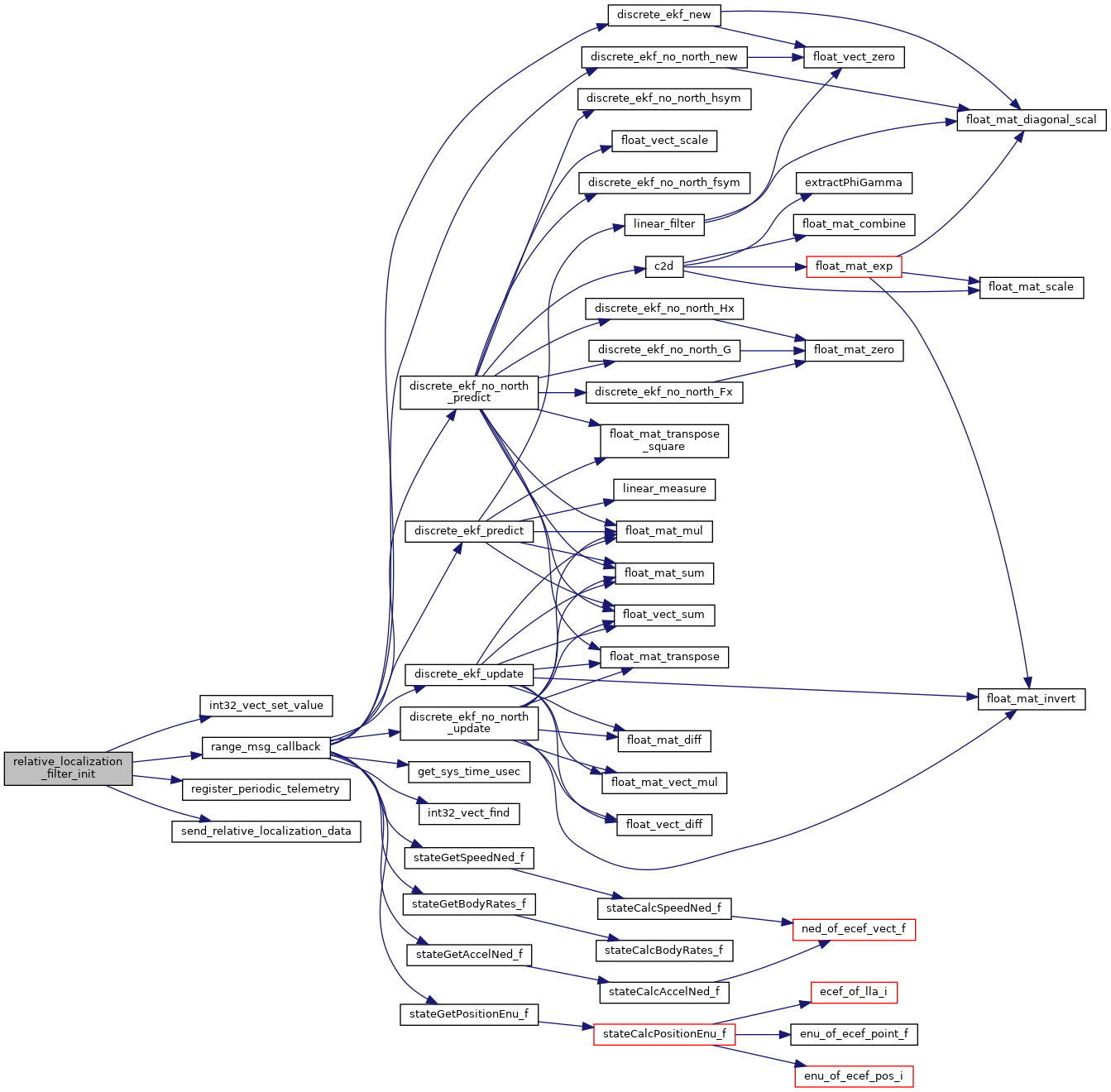
| void relative_localization_filter_init | ( | void | ) |
Definition at line 128 of file relative_localization_filter.c.
References DefaultPeriodic, id_array, int32_vect_set_value(), number_filters, pprzmsg_cnt, range_communication_event, range_msg_callback(), register_periodic_telemetry(), RELATIVE_LOCALIZATION_N_UAVS, send_relative_localization_data(), and UWB_COMM_ID.
Here is the call graph for this function:| void relative_localization_filter_periodic | ( | void | ) |
Definition at line 139 of file relative_localization_filter.c.
References ekf_rl, id_array, number_filters, RELATIVE_LOCALIZATION_ID, and mesonh.mesonh_atmosphere::X.