|
Paparazzi UAS
v6.2.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v6.2.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
Device independent INS code. More...
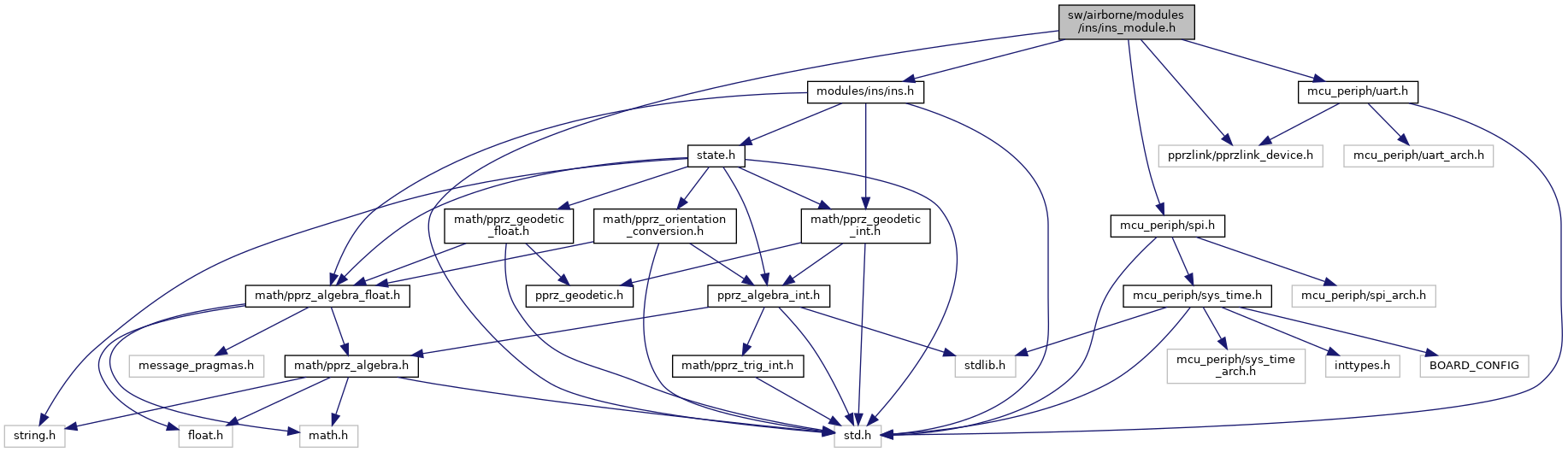
#include "std.h"#include "modules/ins/ins.h"#include "pprzlink/pprzlink_device.h"#include "mcu_periph/uart.h"#include "mcu_periph/spi.h" Include dependency graph for ins_module.h: This graph shows which files directly or indirectly include this file:
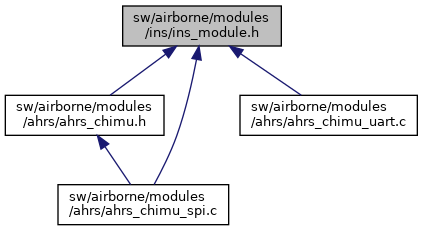
Include dependency graph for ins_module.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | INS_FORMAT float |
| #define | InsLinkDevice (&((INS_LINK).device)) |
| #define | InsSend1(c) InsLinkDevice->put_byte(InsLinkDevice->periph, 0, c) |
| #define | InsUartSend1(c) InsSend1(c) |
| #define | InsSend(_dat, _len) { for (uint8_t i = 0; i< (_len); i++) InsSend1(_dat[i]); }; |
| #define | InsUartSetBaudrate(_b) uart_periph_set_baudrate(INS_LINK, _b) |
Functions | |
| void | handle_ins_msg (void) |
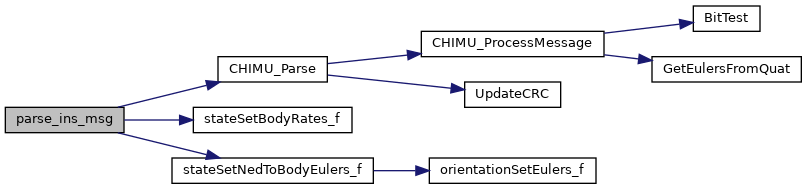
| void | parse_ins_msg (void) |
| void | parse_ins_buffer (uint8_t) |
| static void | ins_event_check_and_handle (void(*handler)(void)) |
| !SITL More... | |
Device independent INS code.
Definition in file ins_module.h.
| #define INS_FORMAT float |
Definition at line 35 of file ins_module.h.
| #define InsLinkDevice (&((INS_LINK).device)) |
Definition at line 76 of file ins_module.h.
Definition at line 84 of file ins_module.h.
| #define InsSend1 | ( | c | ) | InsLinkDevice->put_byte(InsLinkDevice->periph, 0, c) |
Definition at line 82 of file ins_module.h.
| #define InsUartSend1 | ( | c | ) | InsSend1(c) |
Definition at line 83 of file ins_module.h.
| #define InsUartSetBaudrate | ( | _b | ) | uart_periph_set_baudrate(INS_LINK, _b) |
Definition at line 85 of file ins_module.h.
| void handle_ins_msg | ( | void | ) |
Definition at line 150 of file ins_xsens.c.
References FLOAT_VECT2_NORM, float_vect3_norm(), GPS_FIX_3D, GPS_VALID_COURSE_BIT, Xsens::new_attitude, new_ins_attitude, update_state_interface(), Xsens::vel, FloatVect3::x, xsens, and FloatVect3::y.
Here is the call graph for this function:
|
inlinestatic |
!SITL
Definition at line 89 of file ins_module.h.
References dev, ins_msg_received, InsLinkDevice, parse_ins_buffer(), and parse_ins_msg().
Here is the call graph for this function:| void parse_ins_buffer | ( | uint8_t | ) |
|
inline |
Definition at line 107 of file ahrs_chimu_spi.c.
References ahrs_chimu, AHRS_COMP_ID_CHIMU, CHIMU_DATA, CHIMU_Msg_3_IMU_Attitude, CHIMU_Parse(), DefaultChannel, DefaultDevice, dev, CHIMU_attitude_data::euler, InsLinkDevice, AhrsChimu::is_aligned, AhrsChimu::is_enabled, LED_TOGGLE, CHIMU_PARSER_DATA::m_attitude, CHIMU_PARSER_DATA::m_attrates, CHIMU_PARSER_DATA::m_MsgID, CHIMU_PARSER_DATA::m_sensor, new_ins_attitude, CHIMU_Euler::phi, CHIMU_Euler::psi, CHIMU_sensor_data::rate, stateSetBodyRates_f(), stateSetNedToBodyEulers_f(), and CHIMU_Euler::theta.
Referenced by ins_event_check_and_handle().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
|
extern |
|
extern |
|
extern |
Definition at line 64 of file ins_vn100.c.
Referenced by ins_event_check_and_handle().
|
extern |
|
extern |
|
extern |
|
extern |
|
extern |
|
extern |
|
extern |
|
extern |
|
extern |
|
extern |
|
extern |
|
extern |
|
extern |
|
extern |
|
extern |
|
extern |
Referenced by ahrs_chimu_init(), handle_ins_msg(), and parse_ins_msg().