|
Paparazzi UAS
v6.1.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v6.1.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
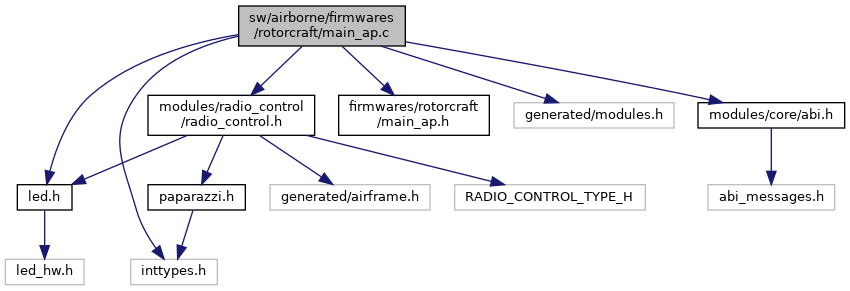
#include <inttypes.h>#include "led.h"#include "modules/radio_control/radio_control.h"#include "firmwares/rotorcraft/main_ap.h"#include "generated/modules.h"#include "modules/core/abi.h" Include dependency graph for main_ap.c:
Include dependency graph for main_ap.c:Go to the source code of this file.
Macros | |
| #define | MODULES_C |
| #define | ABI_C |
| #define | SYS_PERIOD (1.f / PERIODIC_FREQUENCY) |
| #define | SENSORS_PERIOD (1.f / PERIODIC_FREQUENCY) |
| #define | DATALINK_PERIOD (1.f / TELEMETRY_FREQUENCY) |
| #define | RC_LOST_MODE AP_MODE_FAILSAFE |
| mode to enter when RC is lost while using a mode with RC input (not AP_MODE_NAV) More... | |
Functions | |
| void | main_init (void) |
| void | handle_periodic_tasks (void) |
| void | telemetry_periodic (void) |
| void | failsafe_check (void) |
| void | main_event (void) |
Variables | |
| tid_t | modules_mcu_core_tid |
| IDs for timers. More... | |
| tid_t | modules_sensors_tid |
| tid_t | modules_radio_control_tid |
| tid_t | modules_gnc_tid |
| tid_t | modules_datalink_tid |
| tid_t | failsafe_tid |
| id for failsafe_check() timer FIXME More... | |
Rotorcraft main loop.
Definition in file main_ap.c.
| #define DATALINK_PERIOD (1.f / TELEMETRY_FREQUENCY) |
| #define RC_LOST_MODE AP_MODE_FAILSAFE |
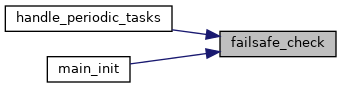
| void failsafe_check | ( | void | ) |
Definition at line 201 of file main_ap.c.
Referenced by handle_periodic_tasks(), and main_init().
Here is the caller graph for this function:| void telemetry_periodic | ( | void | ) |
Definition at line 177 of file main_ap.c.
Referenced by handle_periodic_tasks().
Here is the caller graph for this function:| tid_t failsafe_tid |
id for failsafe_check() timer FIXME
Definition at line 74 of file main_ap.c.
Referenced by handle_periodic_tasks(), and main_init().
| tid_t modules_radio_control_tid |
Definition at line 71 of file main_ap.c.
Referenced by handle_periodic_tasks(), and main_init().
 1.8.17
1.8.17