|
Paparazzi UAS
v6.1.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v6.1.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
Driver for the mateksys_3901_l0x sensor via MSP protocol output. More...
#include "std.h"#include "stdbool.h" Include dependency graph for mateksys_3901_l0x.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for mateksys_3901_l0x.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | Mateksys3901l0X |
Macros | |
| #define | MSP2_IS_SENSOR_MESSAGE(x) ((x) >= 0x1F00 && (x) <= 0x1FFF) |
| #define | MSP2_SENSOR_RANGEFINDER 0x1F01 |
| #define | MSP2_SENSOR_OPTIC_FLOW 0x1F02 |
Functions | |
| void | mateksys3901l0x_init (void) |
| Initialization function. More... | |
| void | mateksys3901l0x_event (void) |
| Receive bytes from the UART port and parse them. More... | |
| void | mateksys3901l0x_downlink (void) |
| void | mateksys_3901_l0x_scale_X (float scalex) |
| Scale the Flow X. More... | |
| void | mateksys_3901_l0x_scale_Y (float scaley) |
| Scale the Flow Y. More... | |
Variables | |
| struct Mateksys3901l0X | mateksys3901l0x |
Driver for the mateksys_3901_l0x sensor via MSP protocol output.
Driver for the mateksys_3901_l0x sensor via MSPx protocol output.
Definition in file mateksys_3901_l0x.h.
| struct Mateksys3901l0X |
Definition at line 72 of file mateksys_3901_l0x.h.
Collaboration diagram for Mateksys3901l0X:| Data Fields | ||
|---|---|---|
| struct link_device * | device | |
| float | distance_compensated | |
| float | distancemm | |
| uint8_t | distancemm_quality | |
| int32_t | distancemm_temp | |
| uint8_t | motion_quality | |
| int32_t | motionX | |
| int32_t | motionX_temp | |
| int32_t | motionY | |
| int32_t | motionY_temp | |
| uint8_t | parse_crc | |
| enum Mateksys3901l0XParseStatus | parse_status | |
| float | scaler_x | |
| float | scaler_y | |
| uint8_t | sensor_id | |
| float | time_usec | |
| float | velocityX | |
| float | velocityY | |
| #define MSP2_IS_SENSOR_MESSAGE | ( | x | ) | ((x) >= 0x1F00 && (x) <= 0x1FFF) |
Definition at line 40 of file mateksys_3901_l0x.h.
| #define MSP2_SENSOR_OPTIC_FLOW 0x1F02 |
Definition at line 43 of file mateksys_3901_l0x.h.
| #define MSP2_SENSOR_RANGEFINDER 0x1F01 |
Definition at line 42 of file mateksys_3901_l0x.h.
Definition at line 45 of file mateksys_3901_l0x.h.
| void mateksys3901l0x_downlink | ( | void | ) |
| void mateksys3901l0x_event | ( | void | ) |
Receive bytes from the UART port and parse them.
Definition at line 151 of file mateksys_3901_l0x.c.
References Mateksys3901l0X::device, mateksys3901l0x, mateksys3901l0x_parse(), MATEKSYS_3901_L0X_INITIALIZE, and Mateksys3901l0X::parse_status.
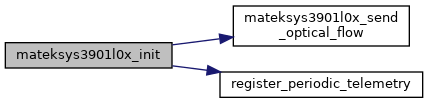
Here is the call graph for this function:| void mateksys3901l0x_init | ( | void | ) |
Initialization function.
Definition at line 110 of file mateksys_3901_l0x.c.
References DefaultPeriodic, Mateksys3901l0X::device, Mateksys3901l0X::distance_compensated, Mateksys3901l0X::distancemm, Mateksys3901l0X::distancemm_quality, Mateksys3901l0X::distancemm_temp, mateksys3901l0x, mateksys3901l0x_send_optical_flow(), MATEKSYS_3901_L0X_FLOW_X_SCALER, MATEKSYS_3901_L0X_FLOW_Y_SCALER, MATEKSYS_3901_L0X_PARSE_HEAD, Mateksys3901l0X::motion_quality, Mateksys3901l0X::motionX, Mateksys3901l0X::motionX_temp, Mateksys3901l0X::motionY, Mateksys3901l0X::motionY_temp, Mateksys3901l0X::parse_crc, Mateksys3901l0X::parse_status, register_periodic_telemetry(), Mateksys3901l0X::scaler_x, and Mateksys3901l0X::scaler_y.
Here is the call graph for this function:| void mateksys_3901_l0x_scale_X | ( | float | scalex | ) |
Scale the Flow X.
Definition at line 135 of file mateksys_3901_l0x.c.
References mateksys3901l0x, and Mateksys3901l0X::scaler_x.
| void mateksys_3901_l0x_scale_Y | ( | float | scaley | ) |
Scale the Flow Y.
Definition at line 143 of file mateksys_3901_l0x.c.
References mateksys3901l0x, and Mateksys3901l0X::scaler_y.
| struct Mateksys3901l0X mateksys3901l0x |
Definition at line 78 of file mateksys_3901_l0x.c.
Referenced by mateksys3901l0x_event(), mateksys3901l0x_init(), mateksys3901l0x_parse(), mateksys3901l0x_send_optical_flow(), mateksys_3901_l0x_scale_X(), and mateksys_3901_l0x_scale_Y().
 1.8.17
1.8.17