|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
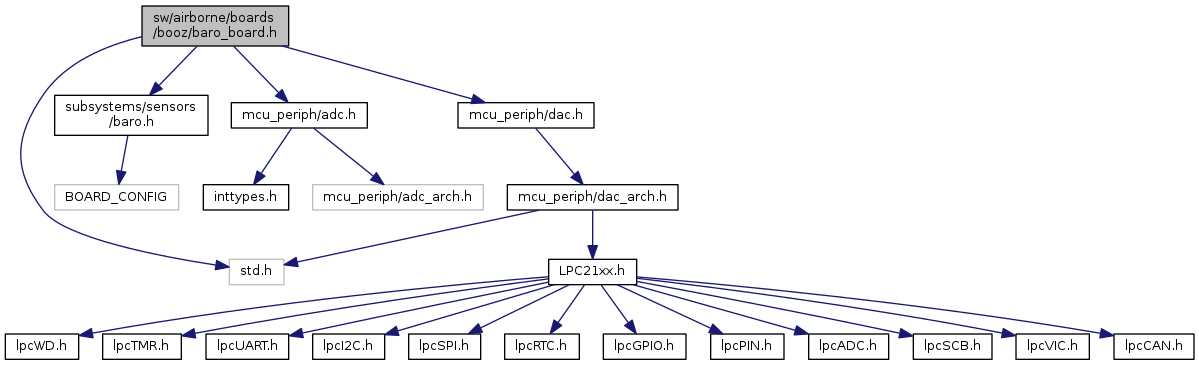
#include "std.h"#include "subsystems/sensors/baro.h"#include "mcu_periph/adc.h"#include "mcu_periph/dac.h" Include dependency graph for baro_board.h:
Include dependency graph for baro_board.h:Go to the source code of this file.
Data Structures | |
| struct | BaroBoard |
Macros | |
| #define | BaroEvent() {} |
Enumerations | |
| enum | BaroBoardStatus { BB_UNINITIALIZED, BB_RUNNING } |
Functions | |
| void | baro_board_calibrate (void) |
| static void | baro_board_SetOffset (uint16_t _o) |
Variables | |
| struct BaroBoard | baro_board |
| struct BaroBoard |
Definition at line 42 of file baro_board.h.
Collaboration diagram for BaroBoard:| Data Fields | ||
|---|---|---|
| int32_t | absolute | |
| struct adc_buf | buf | |
| uint16_t | offset | |
| bool_t | running | |
| enum BaroBoardStatus | status | |
| enum LisaBaroStatus | status | |
| uint16_t | value_filtered | |
| #define BaroEvent | ( | ) | {} |
Definition at line 53 of file baro_board.h.
| enum BaroBoardStatus |
| Enumerator | |
|---|---|
| BB_UNINITIALIZED | |
| BB_RUNNING | |
Definition at line 37 of file baro_board.h.
| void baro_board_calibrate | ( | void | ) |
Definition at line 94 of file baro_board.c.
References baro_board, BB_RUNNING, BOOZ_ANALOG_BARO_THRESHOLD, DACSet(), LED_ON, LED_TOGGLE, BaroBoard::offset, BaroBoard::status, and BaroBoard::value_filtered.
Referenced by baro_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 55 of file baro_board.h.
References baro_board, DACSet(), and BaroBoard::offset.
Here is the call graph for this function:| struct BaroBoard baro_board |
Definition at line 63 of file baro_board.c.
Referenced by baro_board_calibrate(), baro_board_SetOffset(), baro_init(), baro_periodic(), and lisa_l_baro_event().
 1.8.8
1.8.8