|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
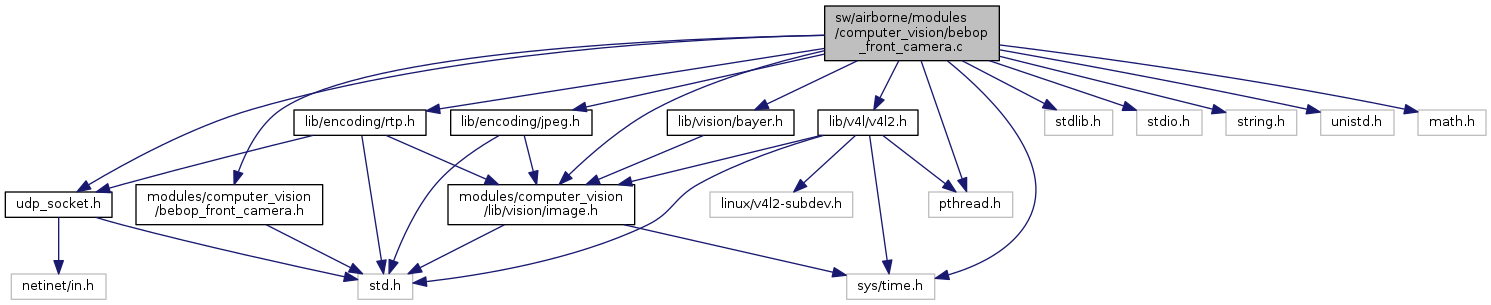
#include "modules/computer_vision/bebop_front_camera.h"#include <stdlib.h>#include <stdio.h>#include <string.h>#include <unistd.h>#include <sys/time.h>#include <math.h>#include "lib/v4l/v4l2.h"#include "lib/vision/image.h"#include "lib/vision/bayer.h"#include "lib/encoding/jpeg.h"#include "lib/encoding/rtp.h"#include "udp_socket.h"#include <pthread.h> Include dependency graph for bebop_front_camera.c:
Include dependency graph for bebop_front_camera.c:Go to the source code of this file.
Macros | |
| #define | MT9F002_WIDTH 1408 |
| #define | MT9F002_HEIGHT 2112 |
| #define | BEBOP_FRONT_CAMERA_WIDTH 272 |
| #define | BEBOP_FRONT_CAMERA_HEIGHT 272 |
| #define | BEBOP_FRONT_CAMERA_SHOT_PATH /data/ftp/internal_000/images |
Functions | |
| static void * | bebop_front_camera_thread (void *data) |
| Handles all the video streaming and saving of the image shots This is a sepereate thread, so it needs to be thread safe! More... | |
| static void | bebop_front_camera_save_shot (struct image_t *img_color, struct image_t *img_jpeg, struct image_t *raw_img) |
| void | bebop_front_camera_periodic (void) |
| A dummy for now. More... | |
| void | bebop_front_camera_take_shot (bool_t take) |
| void | bebop_front_camera_init (void) |
| Initialize the view video. More... | |
| void | bebop_front_camera_start (void) |
| Start with streaming. More... | |
| void | bebop_front_camera_stop (void) |
| Stops the streaming This could take some time, because the thread is stopped asynchronous. More... | |
Variables | |
| struct bebopfrontcamera_t | bebop_front_camera |
| #define BEBOP_FRONT_CAMERA_HEIGHT 272 |
Definition at line 51 of file bebop_front_camera.c.
Referenced by bebop_front_camera_thread().
| #define BEBOP_FRONT_CAMERA_SHOT_PATH /data/ftp/internal_000/images |
Definition at line 55 of file bebop_front_camera.c.
Referenced by bebop_front_camera_init(), and bebop_front_camera_save_shot().
| #define BEBOP_FRONT_CAMERA_WIDTH 272 |
Definition at line 50 of file bebop_front_camera.c.
Referenced by bebop_front_camera_thread().
| #define MT9F002_HEIGHT 2112 |
Definition at line 49 of file bebop_front_camera.c.
Referenced by bebop_front_camera_init().
| #define MT9F002_WIDTH 1408 |
Definition at line 48 of file bebop_front_camera.c.
Referenced by bebop_front_camera_init().
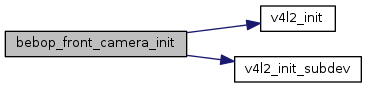
| void bebop_front_camera_init | ( | void | ) |
Initialize the view video.
Definition at line 139 of file bebop_front_camera.c.
References BEBOP_FRONT_CAMERA_SHOT_PATH, bebopfrontcamera_t::dev, MT9F002_HEIGHT, MT9F002_WIDTH, v4l2_init(), and v4l2_init_subdev().
Here is the call graph for this function:| void bebop_front_camera_periodic | ( | void | ) |
A dummy for now.
Definition at line 62 of file bebop_front_camera.c.
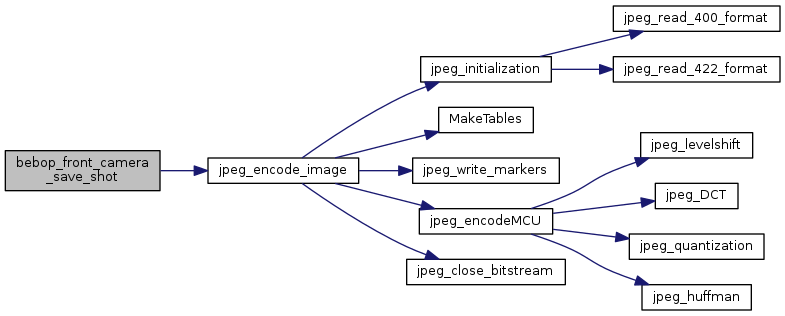
|
static |
Definition at line 204 of file bebop_front_camera.c.
References BEBOP_FRONT_CAMERA_SHOT_PATH, image_t::buf, image_t::buf_size, jpeg_encode_image(), and bebopfrontcamera_t::shot_number.
Referenced by bebop_front_camera_thread().
Here is the call graph for this function: Here is the caller graph for this function:| void bebop_front_camera_start | ( | void | ) |
Start with streaming.
Definition at line 166 of file bebop_front_camera.c.
References bebop_front_camera_thread(), and bebopfrontcamera_t::is_streaming.
Here is the call graph for this function:| void bebop_front_camera_stop | ( | void | ) |
Stops the streaming This could take some time, because the thread is stopped asynchronous.
Definition at line 185 of file bebop_front_camera.c.
References bebopfrontcamera_t::dev, FALSE, bebopfrontcamera_t::is_streaming, v4l2_device::name, and v4l2_stop_capture().
Here is the call graph for this function:| void bebop_front_camera_take_shot | ( | bool_t | take | ) |
Definition at line 73 of file bebop_front_camera.c.
References bebopfrontcamera_t::take_shot, and TRUE.
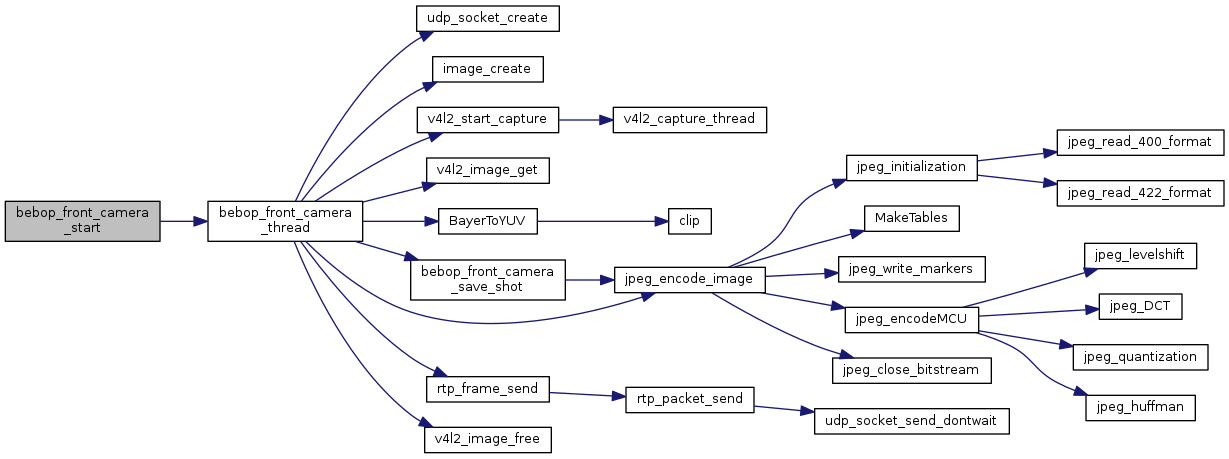
|
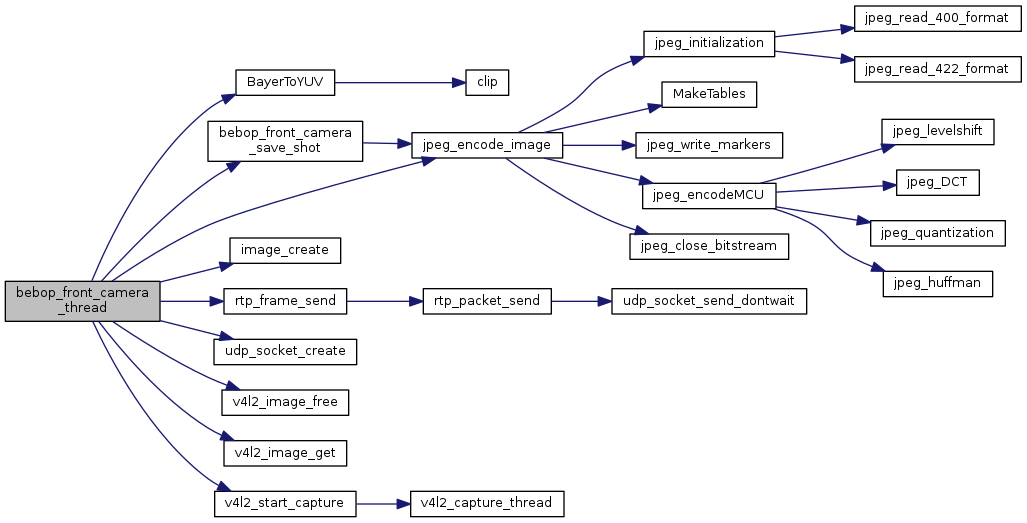
static |
Handles all the video streaming and saving of the image shots This is a sepereate thread, so it needs to be thread safe!
Definition at line 81 of file bebop_front_camera.c.
References BayerToYUV(), BEBOP_FRONT_CAMERA_HEIGHT, bebop_front_camera_save_shot(), BEBOP_FRONT_CAMERA_WIDTH, bebopfrontcamera_t::dev, FALSE, image_create(), IMAGE_JPEG, IMAGE_YUV422, bebopfrontcamera_t::is_streaming, jpeg_encode_image(), v4l2_device::name, rtp_frame_send(), bebopfrontcamera_t::take_shot, TRUE, udp_socket_create(), v4l2_image_free(), v4l2_image_get(), and v4l2_start_capture().
Referenced by bebop_front_camera_start().
Here is the call graph for this function: Here is the caller graph for this function:| struct bebopfrontcamera_t bebop_front_camera |
 1.8.8
1.8.8