|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
Some helper functions to check RC sticks. More...
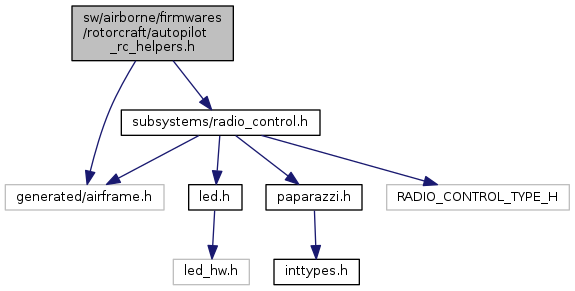
 Include dependency graph for autopilot_rc_helpers.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for autopilot_rc_helpers.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | AUTOPILOT_THROTTLE_THRESHOLD (MAX_PPRZ / 20) |
| #define | AUTOPILOT_YAW_THRESHOLD (MAX_PPRZ * 19 / 20) |
| #define | AUTOPILOT_STICK_CENTER_THRESHOLD (MAX_PPRZ * 1 / 20) |
| #define | THROTTLE_STICK_DOWN() (radio_control.values[RADIO_THROTTLE] < AUTOPILOT_THROTTLE_THRESHOLD) |
| #define | YAW_STICK_PUSHED() |
| #define | YAW_STICK_CENTERED() |
| #define | PITCH_STICK_CENTERED() |
| #define | ROLL_STICK_CENTERED() |
Functions | |
| static bool_t | rc_attitude_sticks_centered (void) |
| static bool_t | kill_switch_is_on (void) |
| static uint8_t | percent_from_rc (int channel) |
Some helper functions to check RC sticks.
Definition in file autopilot_rc_helpers.h.
| #define AUTOPILOT_STICK_CENTER_THRESHOLD (MAX_PPRZ * 1 / 20) |
Definition at line 37 of file autopilot_rc_helpers.h.
| #define AUTOPILOT_THROTTLE_THRESHOLD (MAX_PPRZ / 20) |
Definition at line 34 of file autopilot_rc_helpers.h.
| #define AUTOPILOT_YAW_THRESHOLD (MAX_PPRZ * 19 / 20) |
Definition at line 35 of file autopilot_rc_helpers.h.
| #define PITCH_STICK_CENTERED | ( | ) |
Definition at line 48 of file autopilot_rc_helpers.h.
Referenced by autopilot_arming_check_motors_on(), and rc_attitude_sticks_centered().
| #define ROLL_STICK_CENTERED | ( | ) |
Definition at line 51 of file autopilot_rc_helpers.h.
Referenced by autopilot_arming_check_motors_on(), and rc_attitude_sticks_centered().
| #define THROTTLE_STICK_DOWN | ( | ) | (radio_control.values[RADIO_THROTTLE] < AUTOPILOT_THROTTLE_THRESHOLD) |
Definition at line 40 of file autopilot_rc_helpers.h.
Referenced by autopilot_arming_check_motors_on(), stabilization_attitude_read_rc_setpoint_eulers(), stabilization_attitude_read_rc_setpoint_eulers_f(), stabilization_rate_read_rc(), and stabilization_rate_read_rc_switched_sticks().
| #define YAW_STICK_CENTERED | ( | ) |
Definition at line 45 of file autopilot_rc_helpers.h.
Referenced by autopilot_arming_check_motors_on(), and rc_attitude_sticks_centered().
| #define YAW_STICK_PUSHED | ( | ) |
Definition at line 42 of file autopilot_rc_helpers.h.
Referenced by autopilot_arming_check_motors_on().
|
inlinestatic |
Definition at line 70 of file autopilot_rc_helpers.h.
References FALSE.
Referenced by autopilot_arming_check_motors_on(), and autopilot_on_rc_frame().
Here is the caller graph for this function:
|
inlinestatic |
Definition at line 76 of file autopilot_rc_helpers.h.
References MAX_PPRZ, radio_control, and RadioControl::values.
|
inlinestatic |
Definition at line 55 of file autopilot_rc_helpers.h.
References PITCH_STICK_CENTERED, ROLL_STICK_CENTERED, and YAW_STICK_CENTERED.
Referenced by autopilot_arming_check_motors_on().
Here is the caller graph for this function: 1.8.8
1.8.8