|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "subsystems/sensors/baro.h"#include "subsystems/abi.h"#include "baro_board.h"#include <stdlib.h>#include <stdio.h>#include <string.h>#include <fcntl.h>#include <unistd.h>#include <pthread.h>#include <linux/input.h> Include dependency graph for baro_board.c:
Include dependency graph for baro_board.c:Go to the source code of this file.
Functions | |
| static void * | baro_read (void *data) |
| Check baro thread TODO something better ? More... | |
| void | baro_init (void) |
| void | baro_periodic (void) |
| void | baro_event (void) |
Variables | |
| static bool | baro_swing_available |
| static int32_t | baro_swing_raw |
| static pthread_mutex_t | baro_swing_mutex = PTHREAD_MUTEX_INITIALIZER |
Paparazzi Swing Baro Sensor implementation. Sensor is LPS22HB (I2C) from ST but is accessed through sysfs interface
Definition in file baro_board.c.
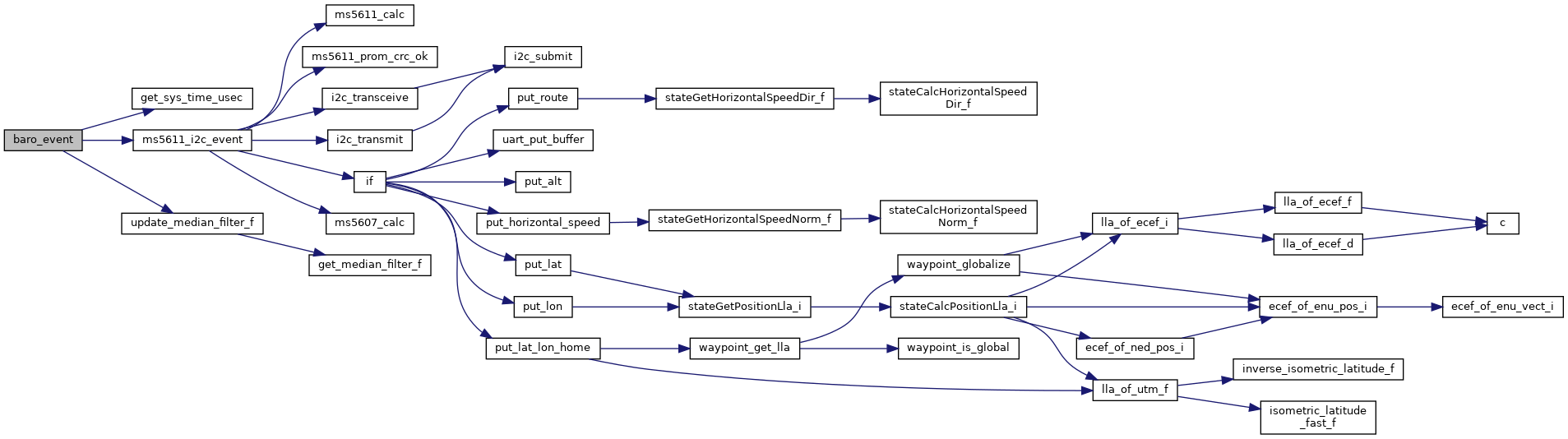
| void baro_event | ( | void | ) |
Definition at line 91 of file baro_board.c.
References BARO_BOARD_SENDER_ID, baro_swing_available, baro_swing_mutex, baro_swing_raw, bb_ms5611, bb_ms5611_filt, Ms5611Data::d1, Ms5611Data::d2, Ms5611_I2c::data, Ms5611_I2c::data_available, DefaultChannel, DefaultDevice, fbaroms, get_sys_time_usec(), LED_TOGGLE, ms5611_i2c_event(), sys_time::nb_sec, Ms5611Data::pressure, Ms5611Data::temperature, and update_median_filter_f().
Here is the call graph for this function:| void baro_init | ( | void | ) |
Definition at line 74 of file baro_board.c.
References baro_read(), baro_swing_available, and baro_swing_raw.
Here is the call graph for this function:| void baro_periodic | ( | void | ) |
Definition at line 88 of file baro_board.c.
|
static |
Check baro thread TODO something better ?
Definition at line 46 of file baro_board.c.
References baro_swing_available, baro_swing_mutex, baro_swing_raw, ev, and TRUE.
Referenced by baro_init().
Here is the caller graph for this function:
|
static |
Definition at line 38 of file baro_board.c.
Referenced by baro_event(), baro_init(), and baro_read().
|
static |
Definition at line 40 of file baro_board.c.
Referenced by baro_event(), and baro_read().
|
static |
Definition at line 39 of file baro_board.c.
Referenced by baro_event(), baro_init(), and baro_read().
 1.8.17
1.8.17