|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
MAVLab Delft University of Technology This control algorithm is Incremental Nonlinear Dynamic Inversion (INDI) More...
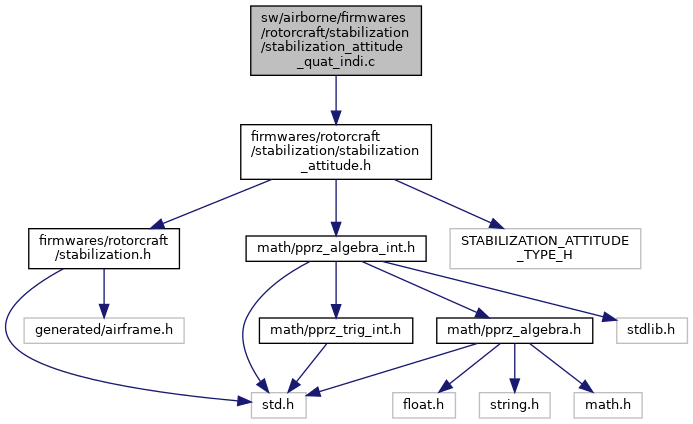
 Include dependency graph for stabilization_attitude_quat_indi.c:
Include dependency graph for stabilization_attitude_quat_indi.c:Go to the source code of this file.
Functions | |
| void | stabilization_attitude_init (void) |
| stabilization_attitude_init More... | |
| void | stabilization_attitude_enter (void) |
| void | stabilization_attitude_set_failsafe_setpoint (void) |
| void | stabilization_attitude_set_rpy_setpoint_i (struct Int32Eulers *rpy) |
| void | stabilization_attitude_set_earth_cmd_i (struct Int32Vect2 *cmd, int32_t heading) |
| void | stabilization_attitude_run (bool in_flight) |
| void | stabilization_attitude_read_rc (bool in_flight, bool in_carefree, bool coordinated_turn) |
MAVLab Delft University of Technology This control algorithm is Incremental Nonlinear Dynamic Inversion (INDI)
MAVLab Delft University of Technology This control algorithm is Incremental Nonlinear Dynamic Inversion (INDI)
This is an implementation of the publication in the journal of Control Guidance and Dynamics: Adaptive Incremental Nonlinear Dynamic Inversion for Attitude Control of Micro Aerial Vehicles
This is an implementation of the publication in the journal of Control Guidance and Dynamics: Adaptive Incremental Nonlinear Dynamic Inversion for Attitude Control of Micro Aerial Vehicles http://arc.aiaa.org/doi/pdf/10.2514/1.G001490
Definition in file stabilization_attitude_quat_indi.c.
| void stabilization_attitude_enter | ( | void | ) |
Definition at line 43 of file stabilization_attitude_quat_indi.c.
References stabilization_indi_enter().
Here is the call graph for this function:| void stabilization_attitude_init | ( | void | ) |
stabilization_attitude_init
Initialize the heli indi attitude controller.
Definition at line 35 of file stabilization_attitude_quat_indi.c.
References stabilization_indi_init().
Here is the call graph for this function:| void stabilization_attitude_read_rc | ( | bool | in_flight, |
| bool | in_carefree, | ||
| bool | coordinated_turn | ||
| ) |
Definition at line 68 of file stabilization_attitude_quat_indi.c.
References stabilization_indi_read_rc().
Here is the call graph for this function:| void stabilization_attitude_run | ( | bool | in_flight | ) |
Definition at line 63 of file stabilization_attitude_quat_indi.c.
References stab_att_sp_quat, and stabilization_indi_attitude_run().
Here is the call graph for this function:| void stabilization_attitude_set_earth_cmd_i | ( | struct Int32Vect2 * | cmd, |
| int32_t | heading | ||
| ) |
Definition at line 58 of file stabilization_attitude_quat_indi.c.
References heading, and stabilization_indi_set_earth_cmd_i().
Here is the call graph for this function:| void stabilization_attitude_set_failsafe_setpoint | ( | void | ) |
Definition at line 48 of file stabilization_attitude_quat_indi.c.
References stabilization_indi_set_failsafe_setpoint().
Here is the call graph for this function:| void stabilization_attitude_set_rpy_setpoint_i | ( | struct Int32Eulers * | rpy | ) |
Definition at line 53 of file stabilization_attitude_quat_indi.c.
References stabilization_indi_set_rpy_setpoint_i().
Here is the call graph for this function: 1.8.17
1.8.17