|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
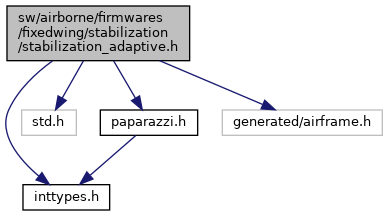
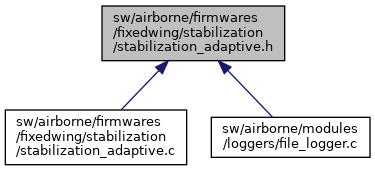
 Include dependency graph for stabilization_adaptive.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for stabilization_adaptive.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | H_CTL_ROLL_SUM_ERR_MAX (MAX_PPRZ/2.) |
| #define | H_CTL_PITCH_SUM_ERR_MAX (MAX_PPRZ/2.) |
| #define | stabilization_adaptive_SetRollIGain(_gain) |
| #define | stabilization_adaptive_SetPitchIGain(_gain) |
Variables | |
| float | h_ctl_roll_sum_err |
| float | h_ctl_pitch_sum_err |
| float | h_ctl_roll_igain |
| float | h_ctl_pitch_igain |
| float | h_ctl_roll_Kffa |
| float | h_ctl_roll_Kffd |
| float | h_ctl_pitch_Kffa |
| float | h_ctl_pitch_Kffd |
| float | h_ctl_pitch_of_roll |
| bool | use_airspeed_ratio |
Fixed wing horizontal adaptive control.
Definition in file stabilization_adaptive.h.
| #define H_CTL_PITCH_SUM_ERR_MAX (MAX_PPRZ/2.) |
Definition at line 54 of file stabilization_adaptive.h.
| #define H_CTL_ROLL_SUM_ERR_MAX (MAX_PPRZ/2.) |
Definition at line 53 of file stabilization_adaptive.h.
| #define stabilization_adaptive_SetPitchIGain | ( | _gain | ) |
Definition at line 61 of file stabilization_adaptive.h.
| #define stabilization_adaptive_SetRollIGain | ( | _gain | ) |
Definition at line 56 of file stabilization_adaptive.h.
| float h_ctl_pitch_igain |
Definition at line 174 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_pitch_loop().
| float h_ctl_pitch_Kffa |
Definition at line 176 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_pitch_loop().
| float h_ctl_pitch_Kffd |
Definition at line 177 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_pitch_loop().
| float h_ctl_pitch_of_roll |
Definition at line 197 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_pitch_loop().
| float h_ctl_pitch_sum_err |
Definition at line 175 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), h_ctl_pitch_loop(), and send_ctl_a().
| float h_ctl_roll_igain |
Definition at line 160 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_roll_loop().
| float h_ctl_roll_Kffa |
Definition at line 162 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_roll_loop().
| float h_ctl_roll_Kffd |
Definition at line 163 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_roll_loop().
| float h_ctl_roll_sum_err |
Definition at line 161 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), h_ctl_roll_loop(), and send_ctl_a().
| bool use_airspeed_ratio |
Definition at line 199 of file stabilization_adaptive.c.
Referenced by h_ctl_init().
 1.8.17
1.8.17