|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
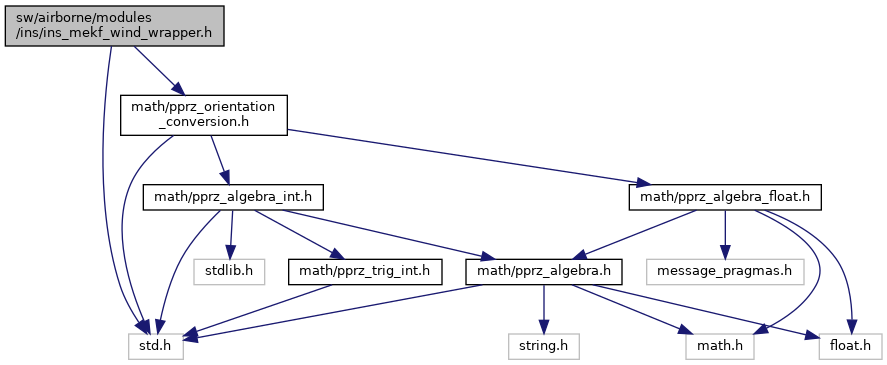
 Include dependency graph for ins_mekf_wind_wrapper.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ins_mekf_wind_wrapper.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | InsMekfWind |
| filter structure More... | |
Macros | |
| #define | ins_mekf_wind_wrapper_Reset(_v) |
Functions | |
| void | ins_mekf_wind_wrapper_init (void) |
| Init function. More... | |
Variables | |
| struct InsMekfWind | ins_mekf_wind |
Paparazzi specific wrapper to run MEKF-Wind INS filter.
Definition in file ins_mekf_wind_wrapper.h.
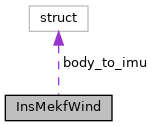
| struct InsMekfWind |
filter structure
Definition at line 35 of file ins_mekf_wind_wrapper.h.
Collaboration diagram for InsMekfWind:| Data Fields | ||
|---|---|---|
| bool | baro_initialized | |
| struct OrientationReps | body_to_imu | |
| bool | gps_initialized | |
| bool | is_aligned | |
| bool | reset | |
| #define ins_mekf_wind_wrapper_Reset | ( | _v | ) |
Definition at line 47 of file ins_mekf_wind_wrapper.h.
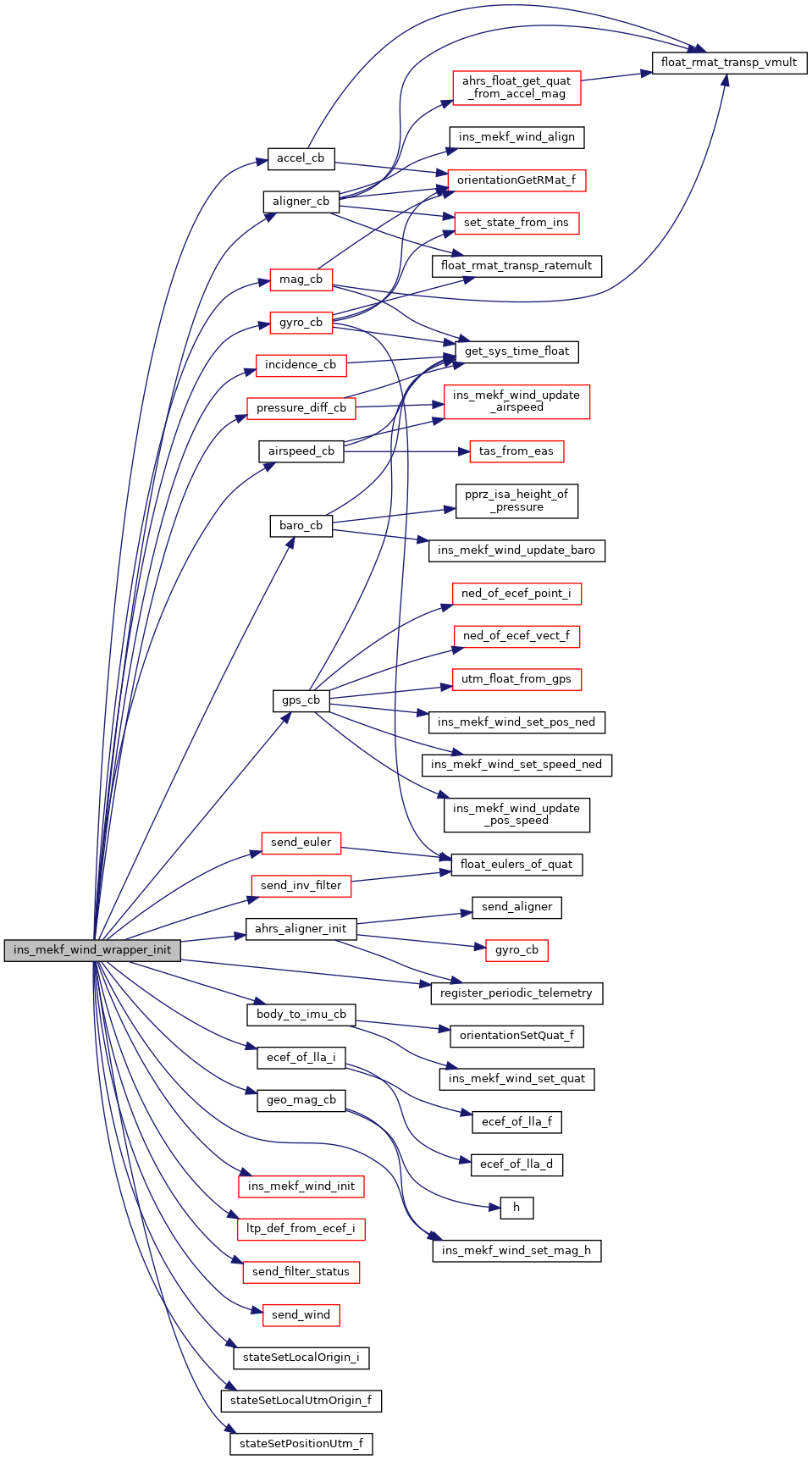
| void ins_mekf_wind_wrapper_init | ( | void | ) |
Init function.
Definition at line 547 of file ins_mekf_wind_wrapper.c.
References ABI_BROADCAST, accel_cb(), accel_ev, ahrs_aligner_init(), airspeed_cb(), airspeed_ev, aligner_cb(), aligner_ev, LlaCoor_i::alt, UtmCoor_f::alt, baro_cb(), baro_ev, InsMekfWind::baro_initialized, body_to_imu_cb(), body_to_imu_ev, counter, DefaultPeriodic, UtmCoor_f::east, ecef_of_lla_i(), geo_mag_cb(), geo_mag_ev, gps_cb(), gps_ev, InsMekfWind::gps_initialized, gyro_cb(), gyro_ev, LtpDef_i::hmsl, incidence_cb(), incidence_ev, ins_mekf_wind, INS_MEKF_WIND_AIRSPEED_ID, INS_MEKF_WIND_BARO_ID, INS_MEKF_WIND_GPS_ID, INS_MEKF_WIND_IMU_ID, INS_MEKF_WIND_INCIDENCE_ID, ins_mekf_wind_init(), INS_MEKF_WIND_MAG_ID, ins_mekf_wind_set_mag_h(), InsMekfWind::is_aligned, LlaCoor_i::lat, LlaCoor_i::lon, ltp_def, ltp_def_from_ecef_i(), mag_cb(), mag_ev, nav_utm_east0, nav_utm_north0, nav_utm_zone0, UtmCoor_f::north, pprzLogFile, pressure_diff_cb(), pressure_diff_ev, register_periodic_telemetry(), InsMekfWind::reset, send_euler(), send_filter_status(), send_inv_filter(), send_wind(), stateSetLocalOrigin_i(), stateSetLocalUtmOrigin_f(), stateSetPositionUtm_f(), and UtmCoor_f::zone.
Here is the call graph for this function:| struct InsMekfWind ins_mekf_wind |
Definition at line 51 of file ins_mekf_wind_wrapper.c.
Referenced by accel_cb(), airspeed_cb(), aligner_cb(), baro_cb(), body_to_imu_cb(), gps_cb(), gyro_cb(), incidence_cb(), ins_mekf_wind_wrapper_init(), mag_cb(), pressure_diff_cb(), and send_filter_status().
 1.8.17
1.8.17