|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
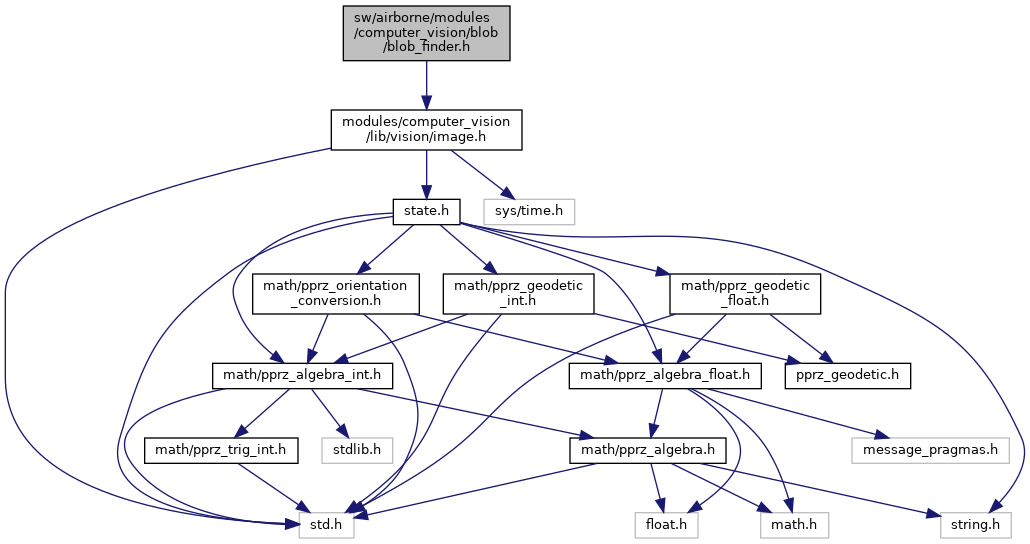
#include "modules/computer_vision/lib/vision/image.h" Include dependency graph for blob_finder.h: This graph shows which files directly or indirectly include this file:
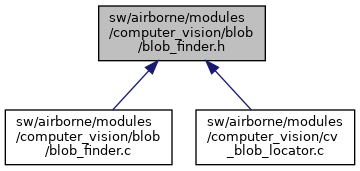
Include dependency graph for blob_finder.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | image_filter_t |
| struct | image_label_t |
Functions | |
| void | image_labeling (struct image_t *input, struct image_t *output, struct image_filter_t *filters, uint8_t filters_cnt, struct image_label_t *labels, uint16_t *labels_count) |
Parse UYVY images and make a list of blobs of connected pixels
Definition in file blob_finder.h.
| struct image_filter_t |
| struct image_label_t |
Definition at line 46 of file blob_finder.h.
Collaboration diagram for image_label_t:| Data Fields | ||
|---|---|---|
| struct point_t | contour[512] | |
| uint16_t | contour_cnt | |
| uint16_t | corners[4] | |
| uint8_t | filter | Which filter triggered this blob. |
| uint16_t | id | Blob number. |
| uint32_t | pixel_cnt | Number of pixels in the blob. |
| uint16_t | x_min | Top left corner. |
| uint32_t | x_sum | Sum of all x coordinates (used to find center of gravity) |
| uint16_t | y_min | |
| uint32_t | y_sum | |
| void image_labeling | ( | struct image_t * | input, |
| struct image_t * | output, | ||
| struct image_filter_t * | filters, | ||
| uint8_t | filters_cnt, | ||
| struct image_label_t * | labels, | ||
| uint16_t * | labels_count | ||
| ) |
Definition at line 33 of file blob_finder.c.
References image_t::buf, f, image_label_t::filter, filters, image_t::h, image_label_t::id, if(), p, image_label_t::pixel_cnt, v_max, v_min, image_t::w, image_label_t::x_min, image_label_t::x_sum, image_label_t::y_min, and image_label_t::y_sum.
Referenced by cv_blob_locator_func().
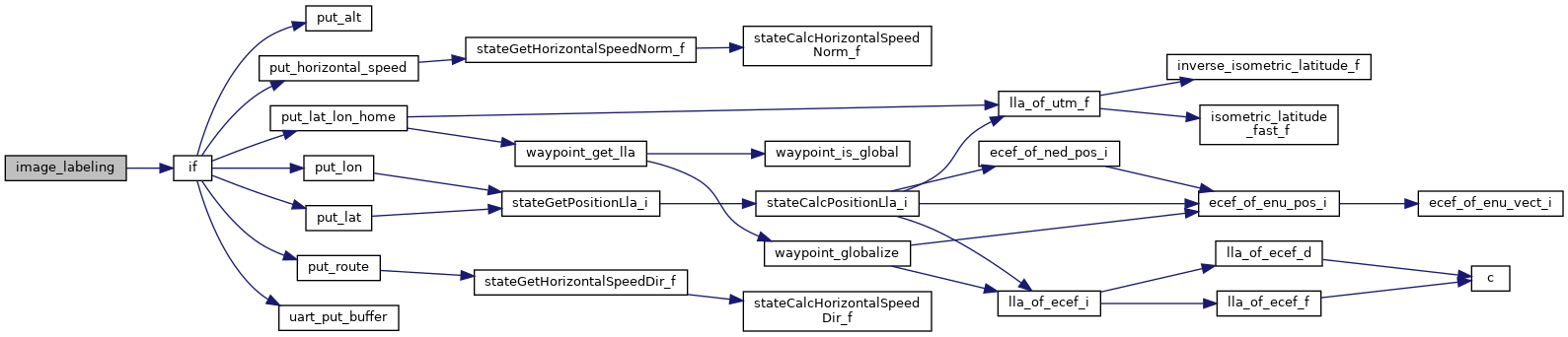
Here is the call graph for this function: Here is the caller graph for this function: 1.8.17
1.8.17