|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
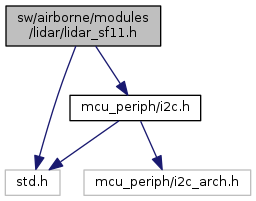
driver for the Parallax SF11-A/B/C Laser Rangefinder connected over i2c bus. More...
 Include dependency graph for lidar_sf11.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for lidar_sf11.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | LidarSF11 |
Enumerations | |
| enum | LidarSF11Status { LIDAR_SF11_REQ_READ, LIDAR_SF11_READ_OK } |
Functions | |
| void | lidar_sf11_init (void) |
| Initialization function. More... | |
| void | lidar_sf11_event (void) |
| Lidar event function Check if the transaction succeded before reading the result. More... | |
| void | lidar_sf11_periodic (void) |
| Poll lidar for data. More... | |
| void | lidar_sf11_downlink (void) |
| Downlink message for debug. More... | |
Variables | |
| struct LidarSF11 | lidar_sf11 |
driver for the Parallax SF11-A/B/C Laser Rangefinder connected over i2c bus.
Definition in file lidar_sf11.h.
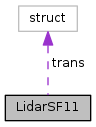
| struct LidarSF11 |
Definition at line 37 of file lidar_sf11.h.
Collaboration diagram for LidarSF11:| Data Fields | ||
|---|---|---|
| uint8_t | addr | |
| bool | compensate_rotation | |
| float | distance | |
| uint32_t | distance_raw | |
| enum LidarSF11Status | status | |
| struct i2c_transaction | trans | |
| bool | update_agl | |
| enum LidarSF11Status |
| Enumerator | |
|---|---|
| LIDAR_SF11_REQ_READ | |
| LIDAR_SF11_READ_OK | |
Definition at line 32 of file lidar_sf11.h.
| void lidar_sf11_downlink | ( | void | ) |
Downlink message for debug.
Definition at line 134 of file lidar_sf11.c.
References DefaultChannel, DefaultDevice, LidarSF11::distance, lidar_sf11, LidarSF11::status, status, i2c_transaction::status, and LidarSF11::trans.
| void lidar_sf11_event | ( | void | ) |
Lidar event function Check if the transaction succeded before reading the result.
Definition at line 62 of file lidar_sf11.c.
References I2CTransDone, I2CTransFailed, I2CTransPending, I2CTransRunning, I2CTransSuccess, lidar_sf11, LIDAR_SF11_READ_OK, LidarSF11::status, i2c_transaction::status, and LidarSF11::trans.
| void lidar_sf11_init | ( | void | ) |
Initialization function.
Definition at line 44 of file lidar_sf11.c.
References LidarSF11::addr, LidarSF11::compensate_rotation, LidarSF11::distance, LidarSF11::distance_raw, I2CTransDone, init_median_filter_i(), lidar_sf11, lidar_sf11_filter, LIDAR_SF11_REQ_READ, MEDIAN_DEFAULT_SIZE, LidarSF11::status, i2c_transaction::status, LidarSF11::trans, and LidarSF11::update_agl.
Here is the call graph for this function:| void lidar_sf11_periodic | ( | void | ) |
Poll lidar for data.
Definition at line 92 of file lidar_sf11.c.
References LidarSF11::addr, AGL_LIDAR_SF11_ID, i2c_transaction::buf, LidarSF11::compensate_rotation, LidarSF11::distance, LidarSF11::distance_raw, get_sys_time_usec(), i2c_transceive(), lidar_sf11, lidar_sf11_filter, LIDAR_SF11_READ_OK, LIDAR_SF11_REQ_READ, FloatEulers::phi, stateGetNedToBodyEulers_f(), LidarSF11::status, FloatEulers::theta, LidarSF11::trans, LidarSF11::update_agl, and update_median_filter_i().
Here is the call graph for this function:| struct LidarSF11 lidar_sf11 |
Definition at line 37 of file lidar_sf11.c.
Referenced by lidar_sf11_downlink(), lidar_sf11_event(), lidar_sf11_init(), and lidar_sf11_periodic().
 1.8.8
1.8.8