|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
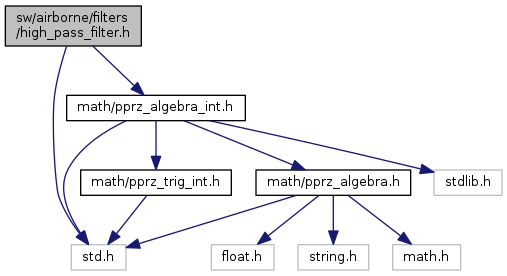
Simple high pass filter with double precision. More...
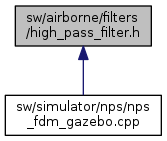
 Include dependency graph for high_pass_filter.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for high_pass_filter.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | FirstOrderHighPass |
| First order high pass filter structure. More... | |
| struct | FourthOrderHighPass |
| Fourth order filter structure. More... | |
Functions | |
| static void | init_first_order_high_pass (struct FirstOrderHighPass *filter, float tau, float sample_time, float value) |
| Init first order high pass filter. More... | |
| static float | update_first_order_high_pass (struct FirstOrderHighPass *filter, float value) |
| Update first order high pass filter state with a new value. More... | |
| static float | get_first_order_high_pass (struct FirstOrderHighPass *filter) |
| Get current value of the first order high pass filter. More... | |
| static void | init_fourth_order_high_pass (struct FourthOrderHighPass *filter, double *a, double *b, double value) |
| Init fourth order high pass filter. More... | |
| static double | update_fourth_order_high_pass (struct FourthOrderHighPass *filter, double value) |
| Update fourth order high pass filter state with a new value. More... | |
| static double | get_fourth_order_high_pass (struct FourthOrderHighPass *filter) |
| Get current value of the fourth order high pass filter. More... | |
Simple high pass filter with double precision.
Definition in file high_pass_filter.h.
| struct FirstOrderHighPass |
First order high pass filter structure.
using bilinear z transform
Definition at line 37 of file high_pass_filter.h.
| Data Fields | ||
|---|---|---|
| float | last_in | |
| float | last_out | |
| float | time_const | |
| struct FourthOrderHighPass |
Fourth order filter structure.
Polynomial discrete form:
b0 + b1 z^-1 + b2 z^-2 etc
H(z) = -------------------— a0 + a1 z^-1 + a2 z^-2 etc
Definition at line 99 of file high_pass_filter.h.
| Data Fields | ||
|---|---|---|
| double | a[4] | denominator gains |
| double | b[4] | numerator gains |
| double | i[4] | input history |
| double | o[4] | output history |
|
inlinestatic |
Get current value of the first order high pass filter.
| filter | first order high pass filter structure |
Definition at line 86 of file high_pass_filter.h.
References FirstOrderHighPass::last_out.
|
inlinestatic |
Get current value of the fourth order high pass filter.
| filter | fourth order high pass filter structure |
Definition at line 159 of file high_pass_filter.h.
References FourthOrderHighPass::o.
|
inlinestatic |
Init first order high pass filter.
Laplace transform in continuous time: tau*s H(s) = ------— 1 + tau*s
| filter | first order high pass filter structure |
| tau | time constant of the first order high pass filter |
| sample_time | sampling period of the signal |
| value | initial value of the filter |
Definition at line 56 of file high_pass_filter.h.
References FirstOrderHighPass::last_in, FirstOrderHighPass::last_out, and FirstOrderHighPass::time_const.
Referenced by nps_fdm_init().
Here is the caller graph for this function:
|
inlinestatic |
Init fourth order high pass filter.
| filter | fourth order high pass filter structure |
| value | initial value of the filter |
Definition at line 112 of file high_pass_filter.h.
References FourthOrderHighPass::a, FourthOrderHighPass::b, FourthOrderHighPass::i, and FourthOrderHighPass::o.
|
inlinestatic |
Update first order high pass filter state with a new value.
| filter | first order high pass filter structure |
| value | new input value of the filter |
Definition at line 70 of file high_pass_filter.h.
References FirstOrderHighPass::last_in, FirstOrderHighPass::last_out, and FirstOrderHighPass::time_const.
Referenced by gazebo_write().
Here is the caller graph for this function:
|
inlinestatic |
Update fourth order high pass filter state with a new value.
| filter | fourth order high pass filter structure |
| value | new input value of the filter |
Definition at line 131 of file high_pass_filter.h.
References FourthOrderHighPass::a, FourthOrderHighPass::b, FourthOrderHighPass::i, and FourthOrderHighPass::o.
 1.8.8
1.8.8