|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|

Fixedwing specific autopilot interface and initialization. More...
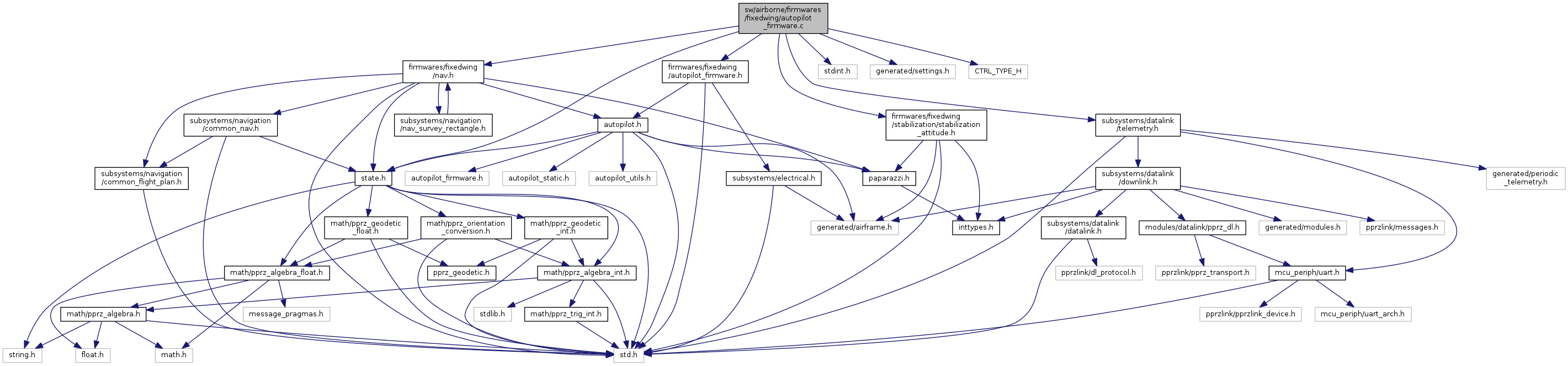
#include "firmwares/fixedwing/autopilot_firmware.h"#include "state.h"#include "firmwares/fixedwing/nav.h"#include <stdint.h>#include "subsystems/datalink/telemetry.h"#include "generated/settings.h"#include "firmwares/fixedwing/stabilization/stabilization_attitude.h"#include <CTRL_TYPE_H> Include dependency graph for autopilot_firmware.c:
Include dependency graph for autopilot_firmware.c:Go to the source code of this file.
Functions | |
| static void | send_mode (struct transport_tx *trans, struct link_device *dev) |
| static void | send_estimator (struct transport_tx *trans, struct link_device *dev) |
| static void | send_energy (struct transport_tx *trans, struct link_device *dev) |
| static void | send_desired (struct transport_tx *trans, struct link_device *dev) |
| static void | send_airspeed (struct transport_tx *trans, struct link_device *dev) |
| void | autopilot_send_mode (void) |
| Report autopilot mode on default downlink channel. More... | |
| void | autopilot_firmware_init (void) |
| Init function. More... | |
Variables | |
| struct Electrical | ap_electrical |
| uint8_t | lateral_mode |
| uint8_t | mcu1_status |
| Second MCU status (FBW part) More... | |
| uint8_t | rc_settings_mode = 0 |
Fixedwing specific autopilot interface and initialization.
Definition in file autopilot_firmware.c.
| void autopilot_firmware_init | ( | void | ) |
Init function.
Definition at line 114 of file autopilot_firmware.c.
Referenced by autopilot_init().
Here is the caller graph for this function:| void autopilot_send_mode | ( | void | ) |
Report autopilot mode on default downlink channel.
Report autopilot mode on default downlink channel.
Definition at line 106 of file autopilot_firmware.c.
References DefaultChannel, DefaultDevice, and send_mode().
Here is the call graph for this function:
|
static |
Definition at line 91 of file autopilot_firmware.c.
References dev, stateGetAirspeed_f(), v_ctl_auto_airspeed_controlled, v_ctl_auto_airspeed_setpoint, and v_ctl_auto_groundspeed_setpoint.
Referenced by autopilot_firmware_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 80 of file autopilot_firmware.c.
References desired_x, desired_y, h_ctl_course_setpoint, h_ctl_pitch_loop_setpoint, h_ctl_roll_setpoint, v_ctl_altitude_setpoint, v_ctl_auto_airspeed_setpoint, and v_ctl_climb_setpoint.
Referenced by autopilot_firmware_init().
Here is the caller graph for this function:
|
static |
Definition at line 69 of file autopilot_firmware.c.
References ap_electrical, autopilot, Electrical::charge, Electrical::current, Electrical::energy, MAX_PPRZ, pprz_autopilot::throttle, and Electrical::vsupply.
Referenced by autopilot_firmware_init().
Here is the caller graph for this function:
|
static |
Definition at line 63 of file autopilot_firmware.c.
References stateGetPositionUtm_f(), and stateGetSpeedEnu_f().
Referenced by autopilot_firmware_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 57 of file autopilot_firmware.c.
References autopilot, horizontal_mode, lateral_mode, mcu1_status, pprz_autopilot::mode, rc_settings_mode, and v_ctl_mode.
Referenced by autopilot_firmware_init(), and autopilot_send_mode().
Here is the caller graph for this function:| struct Electrical ap_electrical |
Definition at line 36 of file autopilot_firmware.c.
Referenced by attitude_loop(), autopilot_firmware_init(), autopilot_generated_on_rc_frame(), autopilot_static_on_rc_frame(), monitor_task(), send_energy(), and v_ctl_guidance_loop().
| uint8_t lateral_mode |
Definition at line 38 of file autopilot_firmware.c.
Referenced by autopilot_static_init(), collective_tracking_control(), fly_to_xy(), gvf_control_2D(), h_ctl_guidance_loop(), nav_without_gps(), navigation_task(), send_mode(), and v_ctl_landing_loop().
| uint8_t mcu1_status |
Second MCU status (FBW part)
Definition at line 39 of file autopilot_firmware.c.
Referenced by mcu1_status_update(), and send_mode().
| uint8_t rc_settings_mode = 0 |
Definition at line 54 of file autopilot_firmware.c.
Referenced by send_mode().
 1.8.8
1.8.8