|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
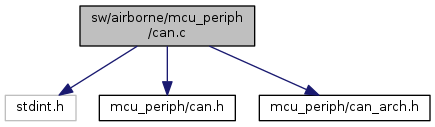
 Include dependency graph for can.c:
Include dependency graph for can.c:Go to the source code of this file.
Functions | |
| void | _can_run_rx_callback (uint32_t id, uint8_t *buf, uint8_t len) |
| void | ppz_can_init (can_rx_callback_t callback) |
| int | ppz_can_transmit (uint32_t id, const uint8_t *buf, uint8_t len) |
Variables | |
| can_rx_callback_t | can_rx_callback |
Definition at line 43 of file can.c.
References can_rx_callback.
| void ppz_can_init | ( | can_rx_callback_t | callback | ) |
Definition at line 32 of file can.c.
References can_hw_init(), and can_rx_callback.
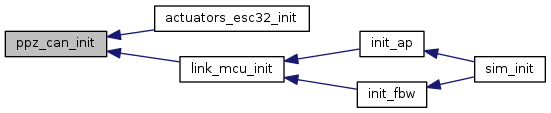
Referenced by actuators_esc32_init(), and link_mcu_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 38 of file can.c.
References can_hw_transmit().
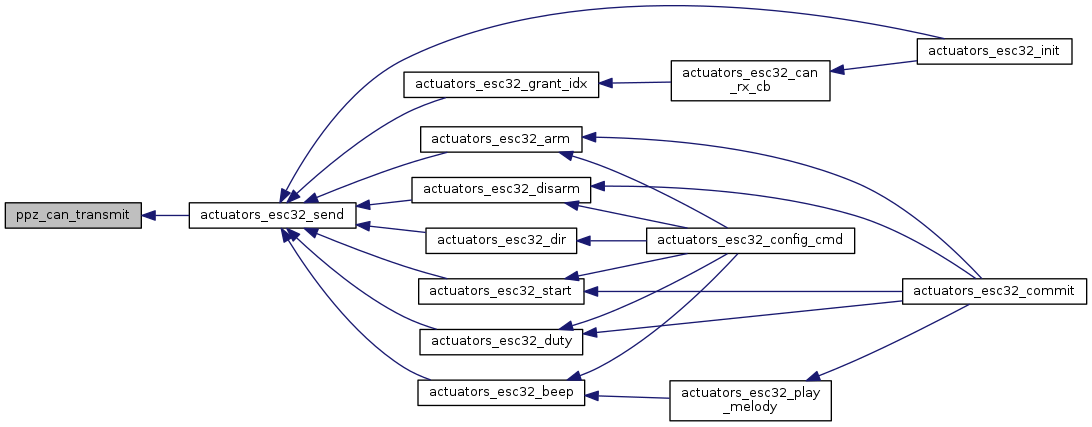
Referenced by actuators_esc32_send().
Here is the call graph for this function: Here is the caller graph for this function:| can_rx_callback_t can_rx_callback |
Definition at line 28 of file can.c.
Referenced by _can_run_rx_callback(), and ppz_can_init().
 1.8.8
1.8.8