|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
navigate along a border line (line 1-2) with turns in the same direction More...
#include "modules/nav/nav_line_border.h"#include "generated/airframe.h"#include "firmwares/fixedwing/nav.h" Include dependency graph for nav_line_border.c:
Include dependency graph for nav_line_border.c:Go to the source code of this file.
Enumerations | |
| enum | line_border_status { LR12, LQC21, LTC2, LQC22, LR21, LQC12, LTC1, LQC11 } |
Functions | |
| void | nav_line_border_setup (void) |
| bool | nav_line_border_run (uint8_t l1, uint8_t l2, float radius) |
Variables | |
| static enum line_border_status | line_border_status |
navigate along a border line (line 1-2) with turns in the same direction
you can use this function to navigate along a border if it is essetial not to cross it navigation is along line p1, p2 with turns in the same direction to make sure you dont cross the line take care youre navigation radius is not to small in strong wind conditions!
Definition in file nav_line_border.c.
| enum line_border_status |
| Enumerator | |
|---|---|
| LR12 | |
| LQC21 | |
| LTC2 | |
| LQC22 | |
| LR21 | |
| LQC12 | |
| LTC1 | |
| LQC11 | |
Definition at line 37 of file nav_line_border.c.
Definition at line 45 of file nav_line_border.c.
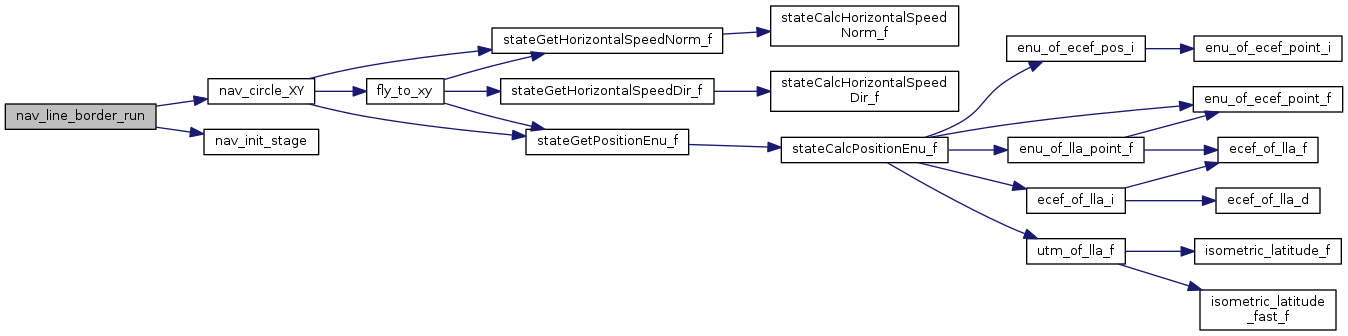
References point::a, CARROT, LQC11, LQC21, LR12, LR21, LTC1, LTC2, nav_circle_XY(), nav_init_stage(), NavApproachingFrom, NavQdrCloseTo, NavSegment, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, radius, WaypointAlt, waypoints, WaypointX, WaypointY, point::x, and point::y.
Here is the call graph for this function:| void nav_line_border_setup | ( | void | ) |
Definition at line 40 of file nav_line_border.c.
References LR12.
|
static |
Definition at line 38 of file nav_line_border.c.
 1.8.8
1.8.8