|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
Adaptation block of the vertical guidance. More...
#include "std.h" Include dependency graph for guidance_v_adapt.h: This graph shows which files directly or indirectly include this file:
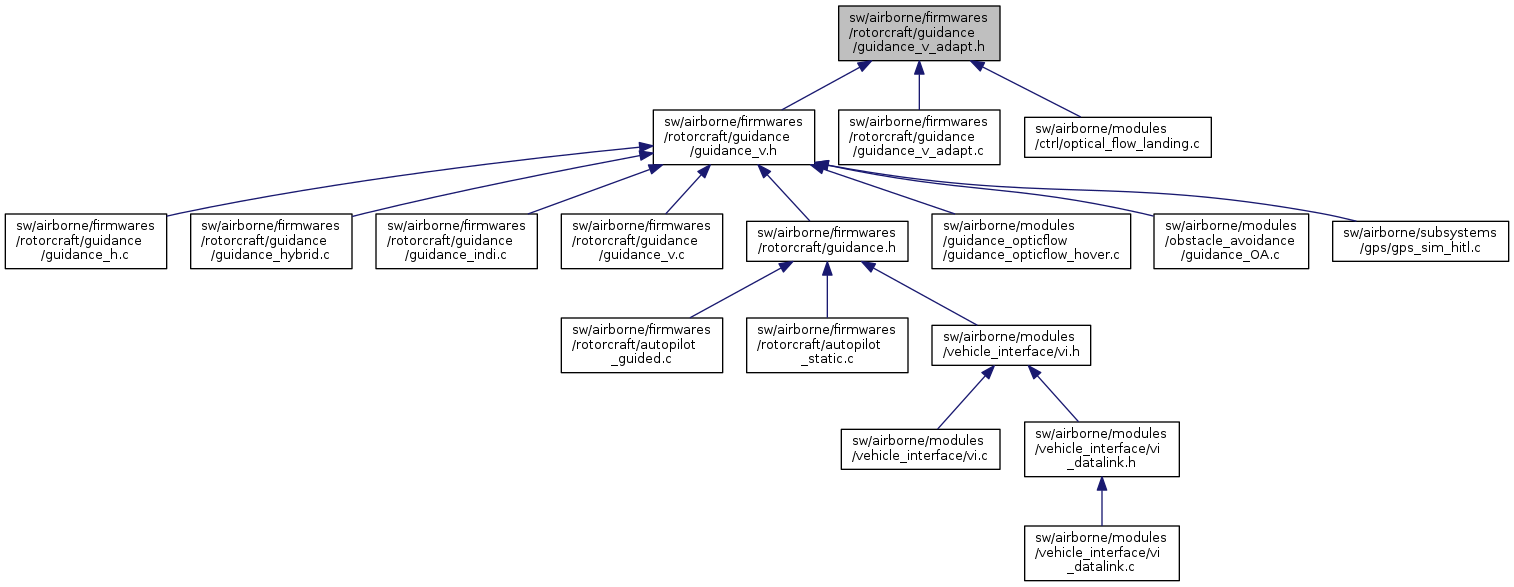
Include dependency graph for guidance_v_adapt.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | GV_ADAPT_X_FRAC 24 |
| #define | GV_ADAPT_P_FRAC 18 |
Functions | |
| void | gv_adapt_init (void) |
| void | gv_adapt_run (int32_t zdd_meas, int32_t thrust_applied, int32_t zd_ref) |
| Adaptation function. More... | |
Variables | |
| int32_t | gv_adapt_X |
| State of the estimator. More... | |
| int32_t | gv_adapt_P |
| Covariance. More... | |
| int32_t | gv_adapt_Xmeas |
| Measurement. More... | |
Adaptation block of the vertical guidance.
This is a dimension one kalman filter estimating the ratio of vertical acceleration over thrust command ( ~ inverse of the mass ) needed by the invert dynamic model to produce a nominal command.
Definition in file guidance_v_adapt.h.
| #define GV_ADAPT_P_FRAC 18 |
Definition at line 47 of file guidance_v_adapt.h.
Referenced by gv_adapt_run().
| #define GV_ADAPT_X_FRAC 24 |
Definition at line 40 of file guidance_v_adapt.h.
Referenced by gv_adapt_run(), and run_hover_loop().
| void gv_adapt_init | ( | void | ) |
Definition at line 120 of file guidance_v_adapt.c.
References gv_adapt_P0, and gv_adapt_X0.
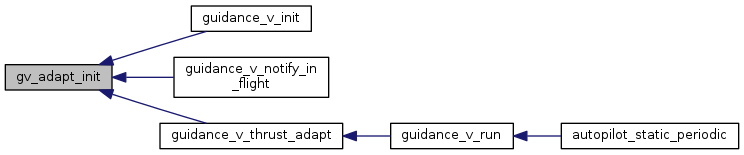
Referenced by guidance_v_init(), guidance_v_notify_in_flight(), and guidance_v_thrust_adapt().
Here is the caller graph for this function:Adaptation function.
| zdd_meas | vert accel measurement in m/s^2 with INT32_ACCEL_FRAC |
| thrust_applied | controller input [0 : MAX_PPRZ] |
| zd_ref | vertical speed reference in m/s with INT32_SPEED_FRAC |
Definition at line 133 of file guidance_v_adapt.c.
References ACCEL_BFP_OF_REAL, BFP_OF_REAL, E, GUIDANCE_V_ADAPT_MAX_ACCEL, GUIDANCE_V_ADAPT_MAX_CMD, GUIDANCE_V_ADAPT_MAX_HOVER_THROTTLE, GUIDANCE_V_ADAPT_MIN_CMD, GUIDANCE_V_ADAPT_MIN_HOVER_THROTTLE, GV_ADAPT_MEAS_NOISE_HOVER, GV_ADAPT_MEAS_NOISE_OF_ZD, gv_adapt_P, gv_adapt_P0, GV_ADAPT_P_FRAC, GV_ADAPT_SYS_NOISE, gv_adapt_X, GV_ADAPT_X_FRAC, INT32_ACCEL_FRAC, INT32_SPEED_FRAC, K_FRAC, MAX_PPRZ, and ref.
Referenced by guidance_v_thrust_adapt().
Here is the caller graph for this function:| int32_t gv_adapt_P |
Covariance.
fixed point representation with GV_ADAPT_P_FRAC Q13.18
Definition at line 100 of file guidance_v_adapt.c.
Referenced by gv_adapt_run(), and send_vert_loop().
| int32_t gv_adapt_X |
State of the estimator.
fixed point representation with GV_ADAPT_X_FRAC Q13.18
Definition at line 99 of file guidance_v_adapt.c.
Referenced by gv_adapt_run(), run_hover_loop(), and send_vert_loop().
| int32_t gv_adapt_Xmeas |
 1.8.8
1.8.8