|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
This module implements optical flow landings in which the divergence is kept constant. When using a fixed gain for control, the covariance between thrust and divergence is tracked, so that the drone knows when it has arrived close to the landing surface. Then, a final landing procedure is triggered. It can also be set to adaptive gain control, where the goal is to continuously gauge the distance to the landing surface. In this mode, the drone will oscillate all the way down to the surface. More...
#include "optical_flow_landing.h"#include "generated/airframe.h"#include "paparazzi.h"#include "subsystems/abi.h"#include "firmwares/rotorcraft/stabilization.h"#include "firmwares/rotorcraft/guidance/guidance_v_adapt.h"#include "autopilot.h"#include "subsystems/navigation/common_flight_plan.h"#include "subsystems/datalink/telemetry.h"#include "mcu_periph/sys_time.h"#include "math/pprz_stat.h" Include dependency graph for optical_flow_landing.c:
Include dependency graph for optical_flow_landing.c:Go to the source code of this file.
Macros | |
| #define | OFL_AGL_ID ABI_BROADCAST |
| #define | OFL_OPTICAL_FLOW_ID ABI_BROADCAST |
| #define | OFL_PGAIN 0.40 |
| #define | OFL_IGAIN 0.01 |
| #define | OFL_DGAIN 0.0 |
| #define | OFL_VISION_METHOD 1 |
| #define | OFL_CONTROL_METHOD 0 |
| #define | OFL_COV_METHOD 0 |
| #define | OFL_COV_WINDOW_SIZE 30 |
| #define | OFL_COV_LANDING_LIMIT 2.2 |
| #define | OFL_COV_SETPOINT -0.0075 |
| #define | OFL_LP_CONST 0.02 |
| #define | OFL_P_LAND_THRESHOLD 0.15 |
| #define | OFL_ELC_OSCILLATE true |
| #define | MINIMUM_GAIN 0.1 |
| #define | INCREASE_GAIN_PER_SECOND 0.02 |
Functions | |
| static void | send_divergence (struct transport_tx *trans, struct link_device *dev) |
| void | vertical_ctrl_agl_cb (uint8_t sender_id, uint32_t stamp, float distance) |
| Function definitions Callback function of the ground altitude. More... | |
| void | vertical_ctrl_optical_flow_cb (uint8_t sender_id, uint32_t stamp, int32_t flow_x, int32_t flow_y, int32_t flow_der_x, int32_t flow_der_y, float quality, float size_divergence) |
| static void | set_cov_div (int32_t thrust) |
| Set the covariance of the divergence and the thrust / past divergence This funciton should only be called once per time step. More... | |
| static int32_t | PID_divergence_control (float setpoint, float P, float I, float D, float dt) |
| Determine and set the thrust for constant divergence control. More... | |
| static void | update_errors (float err, float dt) |
| Updates the integral and differential errors for PID control and sets the previous error. More... | |
| static uint32_t | final_landing_procedure () |
| Execute a final landing procedure. More... | |
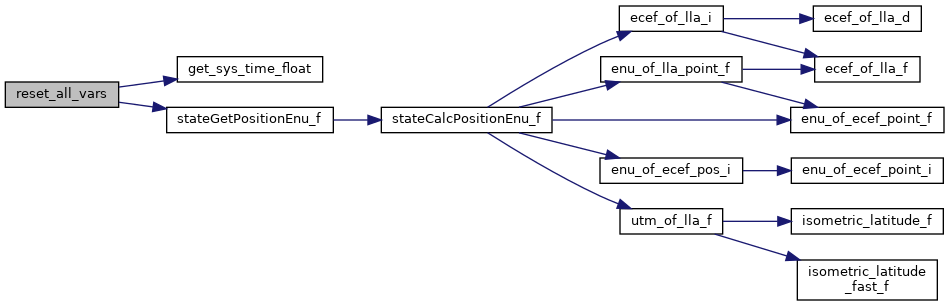
| static void | reset_all_vars (void) |
| Reset all variables: More... | |
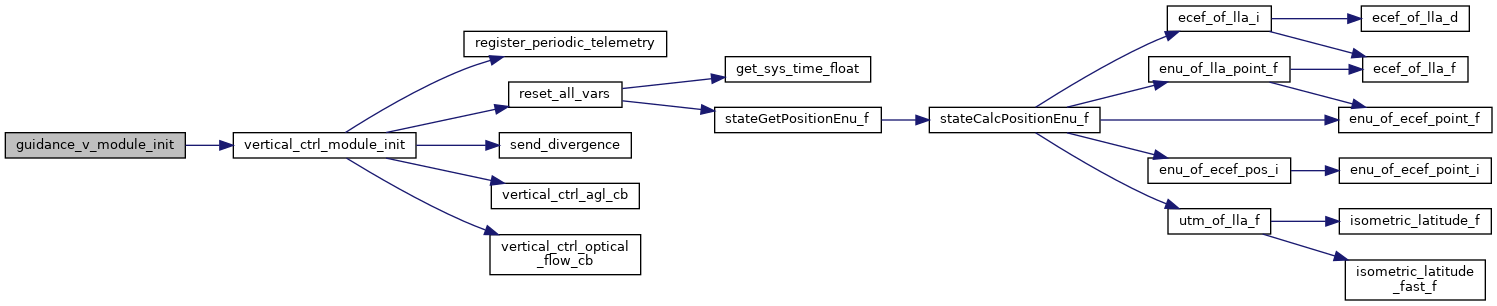
| void | vertical_ctrl_module_init (void) |
| Initialize the optical flow landing module. More... | |
| void | vertical_ctrl_module_run (bool in_flight) |
| Run the optical flow landing module. More... | |
| void | guidance_v_module_init (void) |
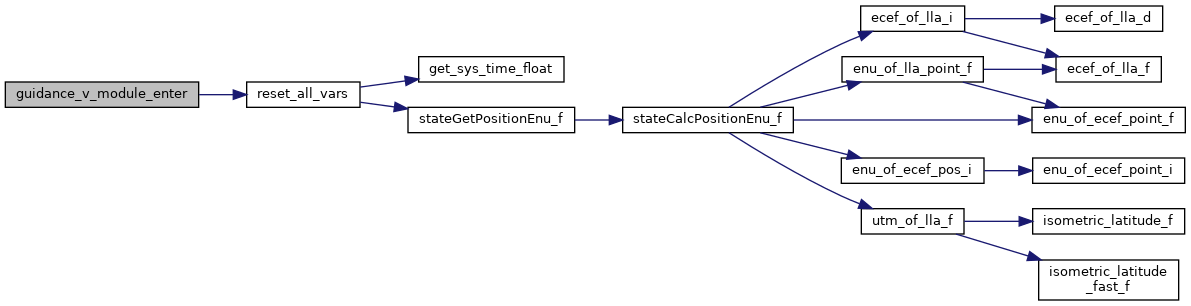
| void | guidance_v_module_enter (void) |
| Entering the module (user switched to module) More... | |
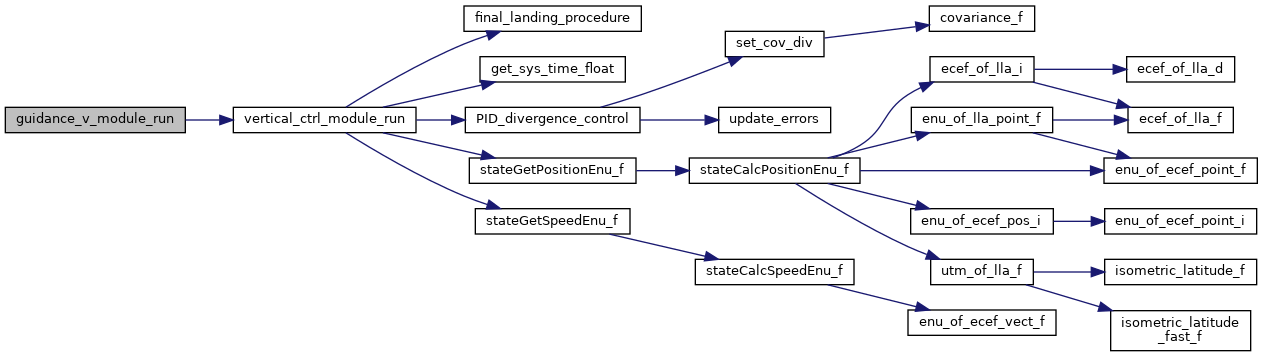
| void | guidance_v_module_run (bool in_flight) |
Variables | |
| float | divergence_vision |
| float | divergence_vision_dt |
| float | normalized_thrust |
| float | cov_div |
| float | pstate |
| float | pused |
| float | istate |
| float | dstate |
| float | vision_time |
| float | prev_vision_time |
| bool | landing |
| float | previous_cov_err |
| int32_t | thrust_set |
| float | divergence_setpoint |
| int32_t | elc_phase |
| uint32_t | elc_time_start |
| float | elc_p_gain_start |
| float | elc_i_gain_start |
| float | elc_d_gain_start |
| int32_t | count_covdiv |
| float | lp_cov_div |
| static abi_event | agl_ev |
| The altitude ABI event. More... | |
| static abi_event | optical_flow_ev |
| struct OpticalFlowLanding | of_landing_ctrl |
| float | thrust_history [OFL_COV_WINDOW_SIZE] |
| float | divergence_history [OFL_COV_WINDOW_SIZE] |
| float | past_divergence_history [OFL_COV_WINDOW_SIZE] |
| uint32_t | ind_hist |
| uint8_t | cov_array_filled |
This module implements optical flow landings in which the divergence is kept constant. When using a fixed gain for control, the covariance between thrust and divergence is tracked, so that the drone knows when it has arrived close to the landing surface. Then, a final landing procedure is triggered. It can also be set to adaptive gain control, where the goal is to continuously gauge the distance to the landing surface. In this mode, the drone will oscillate all the way down to the surface.
de Croon, G.C.H.E. (2016). Monocular distance estimation with optical flow maneuvers and efference copies: a stability-based strategy. Bioinspiration & biomimetics, 11(1), 016004. http://iopscience.iop.org/article/10.1088/1748-3190/11/1/016004
Based on the above theory, we have also developed a new strategy for landing that consists of two phases: (1) while hovering, the drone determines the optimal gain by increasing the gain until oscillation (2) the drone starts landing while exponentially decreasing the gain over time
This strategy leads to smooth, high-performance constant divergence landings, as explained in the article: H.W. Ho, G.C.H.E. de Croon, E. van Kampen, Q.P. Chu, and M. Mulder (submitted) Adaptive Control Strategy for Constant Optical Flow Divergence Landing, https://arxiv.org/abs/1609.06767
Definition in file optical_flow_landing.c.
| #define INCREASE_GAIN_PER_SECOND 0.02 |
Definition at line 130 of file optical_flow_landing.c.
| #define MINIMUM_GAIN 0.1 |
Definition at line 127 of file optical_flow_landing.c.
| #define OFL_AGL_ID ABI_BROADCAST |
Definition at line 64 of file optical_flow_landing.c.
| #define OFL_CONTROL_METHOD 0 |
Definition at line 92 of file optical_flow_landing.c.
| #define OFL_COV_LANDING_LIMIT 2.2 |
Definition at line 105 of file optical_flow_landing.c.
| #define OFL_COV_METHOD 0 |
Definition at line 96 of file optical_flow_landing.c.
| #define OFL_COV_SETPOINT -0.0075 |
Definition at line 109 of file optical_flow_landing.c.
| #define OFL_COV_WINDOW_SIZE 30 |
Definition at line 101 of file optical_flow_landing.c.
| #define OFL_DGAIN 0.0 |
Definition at line 84 of file optical_flow_landing.c.
| #define OFL_ELC_OSCILLATE true |
Definition at line 121 of file optical_flow_landing.c.
| #define OFL_IGAIN 0.01 |
Definition at line 80 of file optical_flow_landing.c.
| #define OFL_LP_CONST 0.02 |
Definition at line 113 of file optical_flow_landing.c.
| #define OFL_OPTICAL_FLOW_ID ABI_BROADCAST |
Definition at line 70 of file optical_flow_landing.c.
| #define OFL_P_LAND_THRESHOLD 0.15 |
Definition at line 117 of file optical_flow_landing.c.
| #define OFL_PGAIN 0.40 |
Definition at line 76 of file optical_flow_landing.c.
| #define OFL_VISION_METHOD 1 |
Definition at line 88 of file optical_flow_landing.c.
|
static |
Execute a final landing procedure.
Definition at line 502 of file optical_flow_landing.c.
References landing, MAX_PPRZ, OpticalFlowLanding::nominal_thrust, and of_landing_ctrl.
Referenced by vertical_ctrl_module_run().
Here is the caller graph for this function:| void guidance_v_module_enter | ( | void | ) |
Entering the module (user switched to module)
Entering the vertical module (user switched to module)
Definition at line 618 of file optical_flow_landing.c.
References MAX_PPRZ, OpticalFlowLanding::nominal_thrust, of_landing_ctrl, reset_all_vars(), stabilization_cmd, and thrust_set.
Here is the call graph for this function:| void guidance_v_module_init | ( | void | ) |
Definition at line 610 of file optical_flow_landing.c.
References vertical_ctrl_module_init().
Here is the call graph for this function:| void guidance_v_module_run | ( | bool | in_flight | ) |
Definition at line 627 of file optical_flow_landing.c.
References vertical_ctrl_module_run().
Here is the call graph for this function:
|
static |
Determine and set the thrust for constant divergence control.
| [out] | thrust | |
| [in] | divergence_set_point | The desired divergence |
| [in] | P | P-gain |
| [in] | I | I-gain |
| [in] | D | D-gain |
| [in] | dt | time difference since last update |
Definition at line 555 of file optical_flow_landing.c.
References D, OpticalFlowLanding::d_err, OpticalFlowLanding::divergence, I, MAX_PPRZ, OpticalFlowLanding::nominal_thrust, of_landing_ctrl, P, set_cov_div(), OpticalFlowLanding::sum_err, and update_errors().
Referenced by vertical_ctrl_module_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Reset all variables:
Definition at line 243 of file optical_flow_landing.c.
References OpticalFlowLanding::agl, OpticalFlowLanding::agl_lp, count_covdiv, cov_array_filled, cov_div, OpticalFlowLanding::d_err, OpticalFlowLanding::dgain, OpticalFlowLanding::divergence, divergence_history, divergence_setpoint, divergence_vision, divergence_vision_dt, dstate, elc_phase, elc_time_start, get_sys_time_float(), OpticalFlowLanding::igain, ind_hist, istate, landing, lp_cov_div, MAX_PPRZ, OpticalFlowLanding::nominal_thrust, normalized_thrust, of_landing_ctrl, OFL_COV_WINDOW_SIZE, OpticalFlowLanding::pgain, prev_vision_time, previous_cov_err, OpticalFlowLanding::previous_err, pstate, pused, stateGetPositionEnu_f(), OpticalFlowLanding::sum_err, thrust_history, thrust_set, vision_time, and EnuCoor_f::z.
Referenced by guidance_v_module_enter(), and vertical_ctrl_module_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 160 of file optical_flow_landing.c.
References OpticalFlowLanding::agl, cov_div, dev, OpticalFlowLanding::divergence, divergence_vision_dt, normalized_thrust, of_landing_ctrl, pstate, and pused.
Referenced by vertical_ctrl_module_init().
Here is the caller graph for this function:
|
static |
Set the covariance of the divergence and the thrust / past divergence This funciton should only be called once per time step.
| [in] | thrust | the current thrust value |
Definition at line 518 of file optical_flow_landing.c.
References cov_array_filled, cov_div, OpticalFlowLanding::COV_METHOD, covariance_f(), OpticalFlowLanding::delay_steps, OpticalFlowLanding::divergence, divergence_history, ind_hist, MAX_PPRZ, normalized_thrust, of_landing_ctrl, past_divergence_history, thrust_history, and OpticalFlowLanding::window_size.
Referenced by PID_divergence_control().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Updates the integral and differential errors for PID control and sets the previous error.
| [in] | err | the error of the divergence and divergence setpoint |
| [in] | dt | time difference since last update |
Definition at line 583 of file optical_flow_landing.c.
References OpticalFlowLanding::d_err, f, OpticalFlowLanding::lp_const, of_landing_ctrl, OpticalFlowLanding::previous_err, and OpticalFlowLanding::sum_err.
Referenced by PID_divergence_control().
Here is the caller graph for this function:Function definitions Callback function of the ground altitude.
Definition at line 595 of file optical_flow_landing.c.
References OpticalFlowLanding::agl, and of_landing_ctrl.
Referenced by vertical_ctrl_module_init().
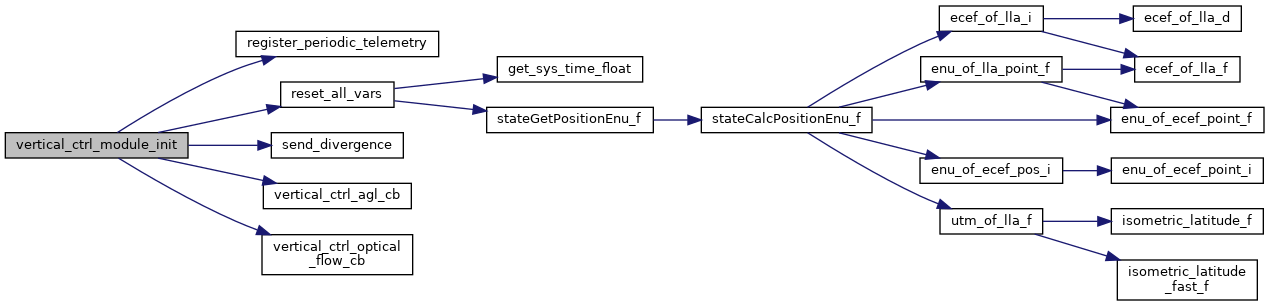
Here is the caller graph for this function:| void vertical_ctrl_module_init | ( | void | ) |
Initialize the optical flow landing module.
Definition at line 195 of file optical_flow_landing.c.
References OpticalFlowLanding::agl, agl_ev, OpticalFlowLanding::agl_lp, OpticalFlowLanding::CONTROL_METHOD, OpticalFlowLanding::cov_limit, OpticalFlowLanding::COV_METHOD, OpticalFlowLanding::cov_set_point, OpticalFlowLanding::d_err, DefaultPeriodic, OpticalFlowLanding::delay_steps, OpticalFlowLanding::dgain, OpticalFlowLanding::dgain_adaptive, OpticalFlowLanding::divergence, OpticalFlowLanding::divergence_setpoint, OpticalFlowLanding::elc_oscillate, guidance_v_nominal_throttle, OpticalFlowLanding::igain, OpticalFlowLanding::igain_adaptive, OpticalFlowLanding::lp_const, OpticalFlowLanding::lp_cov_div_factor, MAX_PPRZ, OpticalFlowLanding::nominal_thrust, of_landing_ctrl, OFL_AGL_ID, OFL_CONTROL_METHOD, OFL_COV_LANDING_LIMIT, OFL_COV_METHOD, OFL_COV_SETPOINT, OFL_COV_WINDOW_SIZE, OFL_DGAIN, OFL_ELC_OSCILLATE, OFL_IGAIN, OFL_LP_CONST, OFL_OPTICAL_FLOW_ID, OFL_P_LAND_THRESHOLD, OFL_PGAIN, OFL_VISION_METHOD, optical_flow_ev, OpticalFlowLanding::p_land_threshold, OpticalFlowLanding::pgain, OpticalFlowLanding::pgain_adaptive, OpticalFlowLanding::previous_err, OpticalFlowLanding::reduction_factor_elc, register_periodic_telemetry(), reset_all_vars(), send_divergence(), OpticalFlowLanding::sum_err, OpticalFlowLanding::t_transition, OpticalFlowLanding::vel, vertical_ctrl_agl_cb(), vertical_ctrl_optical_flow_cb(), OpticalFlowLanding::VISION_METHOD, and OpticalFlowLanding::window_size.
Referenced by guidance_v_module_init().
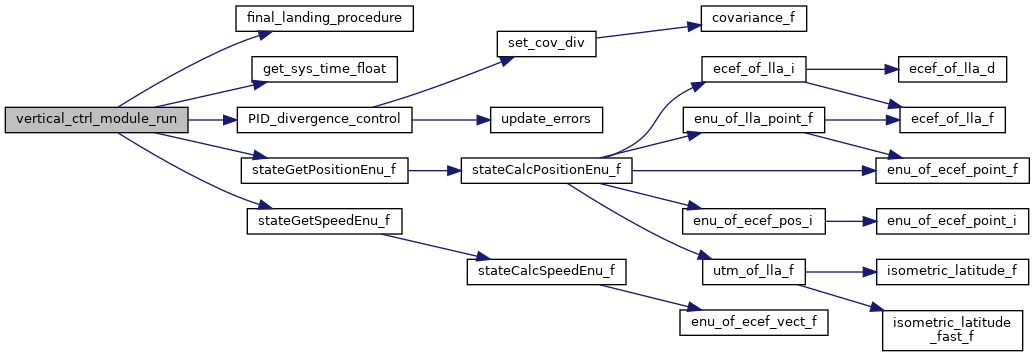
Here is the call graph for this function: Here is the caller graph for this function:| void vertical_ctrl_module_run | ( | bool | in_flight | ) |
Run the optical flow landing module.
Definition at line 288 of file optical_flow_landing.c.
References OpticalFlowLanding::agl, OpticalFlowLanding::agl_lp, OpticalFlowLanding::CONTROL_METHOD, count_covdiv, cov_div, OpticalFlowLanding::cov_limit, OpticalFlowLanding::COV_METHOD, OpticalFlowLanding::cov_set_point, OpticalFlowLanding::dgain, OpticalFlowLanding::divergence, OpticalFlowLanding::divergence_setpoint, divergence_vision, divergence_vision_dt, dstate, elc_d_gain_start, elc_i_gain_start, OpticalFlowLanding::elc_oscillate, elc_p_gain_start, elc_phase, elc_time_start, f, final_landing_procedure(), get_sys_time_float(), OpticalFlowLanding::igain, OpticalFlowLanding::igain_adaptive, INCREASE_GAIN_PER_SECOND, istate, landing, OpticalFlowLanding::lp_const, lp_cov_div, OpticalFlowLanding::lp_cov_div_factor, MAX_PPRZ, MINIMUM_GAIN, OpticalFlowLanding::nominal_thrust, of_landing_ctrl, OpticalFlowLanding::p_land_threshold, OpticalFlowLanding::pgain, OpticalFlowLanding::pgain_adaptive, PID_divergence_control(), prev_vision_time, pstate, pused, OpticalFlowLanding::reduction_factor_elc, stabilization_cmd, stateGetPositionEnu_f(), stateGetSpeedEnu_f(), OpticalFlowLanding::sum_err, OpticalFlowLanding::t_transition, thrust_set, OpticalFlowLanding::vel, OpticalFlowLanding::VISION_METHOD, vision_time, and EnuCoor_f::z.
Referenced by guidance_v_module_run().
Here is the call graph for this function: Here is the caller graph for this function:| void vertical_ctrl_optical_flow_cb | ( | uint8_t sender_id | UNUSED, |
| uint32_t | stamp, | ||
| int32_t flow_x | UNUSED, | ||
| int32_t flow_y | UNUSED, | ||
| int32_t flow_der_x | UNUSED, | ||
| int32_t flow_der_y | UNUSED, | ||
| float quality | UNUSED, | ||
| float | size_divergence | ||
| ) |
Definition at line 600 of file optical_flow_landing.c.
References divergence_vision, and vision_time.
Referenced by vertical_ctrl_module_init().
Here is the caller graph for this function:
|
static |
The altitude ABI event.
Definition at line 153 of file optical_flow_landing.c.
Referenced by vertical_ctrl_module_init().
| int32_t count_covdiv |
Definition at line 150 of file optical_flow_landing.c.
Referenced by reset_all_vars(), and vertical_ctrl_module_run().
| uint8_t cov_array_filled |
Definition at line 187 of file optical_flow_landing.c.
Referenced by reset_all_vars(), and set_cov_div().
| float cov_div |
Definition at line 136 of file optical_flow_landing.c.
Referenced by reset_all_vars(), send_divergence(), set_cov_div(), and vertical_ctrl_module_run().
| float divergence_history[OFL_COV_WINDOW_SIZE] |
Definition at line 184 of file optical_flow_landing.c.
Referenced by reset_all_vars(), and set_cov_div().
| float divergence_setpoint |
Definition at line 144 of file optical_flow_landing.c.
Referenced by reset_all_vars().
| float divergence_vision |
Definition at line 133 of file optical_flow_landing.c.
Referenced by reset_all_vars(), vertical_ctrl_module_run(), and vertical_ctrl_optical_flow_cb().
| float divergence_vision_dt |
Definition at line 134 of file optical_flow_landing.c.
Referenced by reset_all_vars(), send_divergence(), and vertical_ctrl_module_run().
| float dstate |
Definition at line 139 of file optical_flow_landing.c.
Referenced by reset_all_vars(), and vertical_ctrl_module_run().
| float elc_d_gain_start |
Definition at line 149 of file optical_flow_landing.c.
Referenced by vertical_ctrl_module_run().
| float elc_i_gain_start |
Definition at line 149 of file optical_flow_landing.c.
Referenced by vertical_ctrl_module_run().
| float elc_p_gain_start |
Definition at line 149 of file optical_flow_landing.c.
Referenced by vertical_ctrl_module_run().
| int32_t elc_phase |
Definition at line 147 of file optical_flow_landing.c.
Referenced by reset_all_vars(), and vertical_ctrl_module_run().
| uint32_t elc_time_start |
Definition at line 148 of file optical_flow_landing.c.
Referenced by reset_all_vars(), and vertical_ctrl_module_run().
| uint32_t ind_hist |
Definition at line 186 of file optical_flow_landing.c.
Referenced by reset_all_vars(), and set_cov_div().
| float istate |
Definition at line 138 of file optical_flow_landing.c.
Referenced by reset_all_vars(), and vertical_ctrl_module_run().
| bool landing |
Definition at line 141 of file optical_flow_landing.c.
Referenced by final_landing_procedure(), reset_all_vars(), and vertical_ctrl_module_run().
| float lp_cov_div |
Definition at line 151 of file optical_flow_landing.c.
Referenced by reset_all_vars(), and vertical_ctrl_module_run().
| float normalized_thrust |
Definition at line 135 of file optical_flow_landing.c.
Referenced by reset_all_vars(), send_divergence(), and set_cov_div().
| struct OpticalFlowLanding of_landing_ctrl |
Definition at line 157 of file optical_flow_landing.c.
Referenced by final_landing_procedure(), guidance_v_module_enter(), PID_divergence_control(), reset_all_vars(), send_divergence(), set_cov_div(), update_errors(), vertical_ctrl_agl_cb(), vertical_ctrl_module_init(), and vertical_ctrl_module_run().
|
static |
Definition at line 154 of file optical_flow_landing.c.
Referenced by vertical_ctrl_module_init().
| float past_divergence_history[OFL_COV_WINDOW_SIZE] |
Definition at line 185 of file optical_flow_landing.c.
Referenced by set_cov_div().
| float prev_vision_time |
Definition at line 140 of file optical_flow_landing.c.
Referenced by reset_all_vars(), and vertical_ctrl_module_run().
| float previous_cov_err |
Definition at line 142 of file optical_flow_landing.c.
Referenced by reset_all_vars().
| float pstate |
Definition at line 137 of file optical_flow_landing.c.
Referenced by reset_all_vars(), send_divergence(), and vertical_ctrl_module_run().
| float pused |
Definition at line 137 of file optical_flow_landing.c.
Referenced by reset_all_vars(), send_divergence(), and vertical_ctrl_module_run().
| float thrust_history[OFL_COV_WINDOW_SIZE] |
Definition at line 183 of file optical_flow_landing.c.
Referenced by reset_all_vars(), and set_cov_div().
| int32_t thrust_set |
Definition at line 143 of file optical_flow_landing.c.
Referenced by guidance_v_module_enter(), reset_all_vars(), and vertical_ctrl_module_run().
| float vision_time |
Definition at line 140 of file optical_flow_landing.c.
Referenced by reset_all_vars(), vertical_ctrl_module_run(), and vertical_ctrl_optical_flow_cb().
 1.8.17
1.8.17