|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
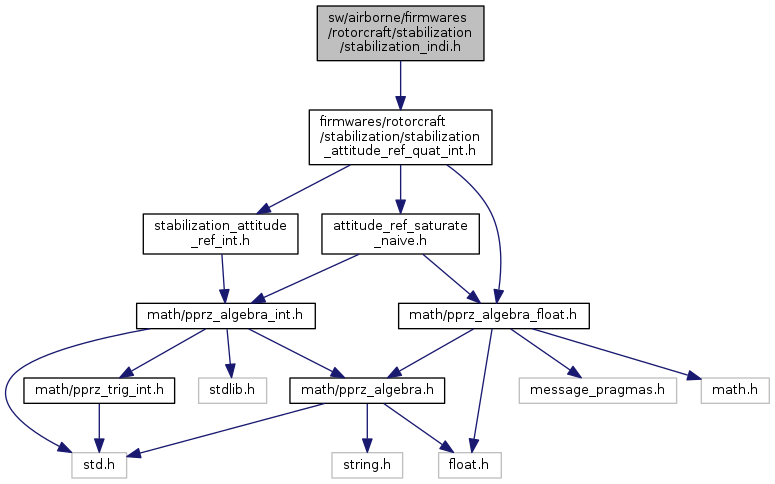
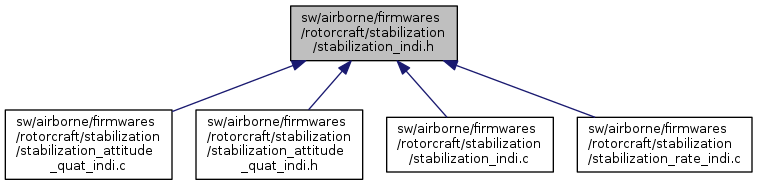
 Include dependency graph for stabilization_indi.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for stabilization_indi.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | ReferenceSystem |
| struct | IndiFilter |
| struct | IndiEstimation |
| struct | IndiVariables |
Functions | |
| void | stabilization_indi_init (void) |
| void | stabilization_indi_enter (void) |
| void | stabilization_indi_set_failsafe_setpoint (void) |
| void | stabilization_indi_set_rpy_setpoint_i (struct Int32Eulers *rpy) |
| void | stabilization_indi_set_earth_cmd_i (struct Int32Vect2 *cmd, int32_t heading) |
| void | stabilization_indi_run (bool enable_integrator, bool rate_control) |
| void | stabilization_indi_read_rc (bool in_flight, bool in_carefree, bool coordinated_turn) |
Variables | |
| struct Int32Quat | stab_att_sp_quat |
| with INT32_QUAT_FRAC More... | |
| struct Int32Eulers | stab_att_sp_euler |
| with INT32_ANGLE_FRAC More... | |
| struct IndiVariables | indi |
| struct ReferenceSystem |
Definition at line 42 of file stabilization_indi.h.
| Data Fields | ||
|---|---|---|
| float | err_p | |
| float | err_q | |
| float | err_r | |
| float | rate_p | |
| float | rate_q | |
| float | rate_r | |
| struct IndiFilter |
Definition at line 51 of file stabilization_indi.h.
Collaboration diagram for IndiFilter:| Data Fields | ||
|---|---|---|
| struct FloatRates | ddx | |
| struct FloatRates | dx | |
| float | omega | |
| float | omega2 | |
| float | omega2_r | |
| float | omega_r | |
| struct FloatRates | x | |
| float | zeta | |
| struct IndiEstimation |
Definition at line 63 of file stabilization_indi.h.
Collaboration diagram for IndiEstimation:| Data Fields | ||
|---|---|---|
| struct FloatRates | g1 | |
| float | g2 | |
| float | mu | |
| struct IndiFilter | rate | |
| struct IndiFilter | u | |
| struct IndiVariables |
Definition at line 71 of file stabilization_indi.h.
Collaboration diagram for IndiVariables:| Data Fields | ||
|---|---|---|
| bool | adaptive | Enable adataptive estimation. |
| struct FloatRates | angular_accel_ref | |
| float | attitude_max_yaw_rate | Maximum yaw rate in atttiude control in rad/s. |
| struct FloatRates | du | |
| struct IndiEstimation | est | Estimation parameters for adaptive INDI. |
| struct FloatRates | g1 | |
| float | g2 | |
| float | max_rate | Maximum rate in rate control in rad/s. |
| struct IndiFilter | rate | |
| struct ReferenceSystem | reference_acceleration | |
| struct IndiFilter | u | |
| struct FloatRates | u_act_dyn | |
| struct FloatRates | u_in | |
| void stabilization_indi_enter | ( | void | ) |
Definition at line 156 of file stabilization_indi.c.
References IndiVariables::angular_accel_ref, IndiFilter::ddx, IndiVariables::du, IndiFilter::dx, FLOAT_RATES_ZERO, Int32Eulers::psi, IndiVariables::rate, stab_att_sp_euler, stabilization_attitude_get_heading_i(), IndiVariables::u, IndiVariables::u_act_dyn, IndiVariables::u_in, and IndiFilter::x.
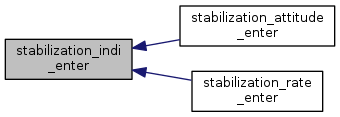
Referenced by stabilization_attitude_enter(), and stabilization_rate_enter().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_indi_init | ( | void | ) |
Definition at line 143 of file stabilization_indi.c.
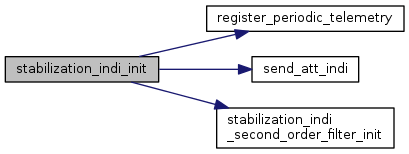
References DefaultPeriodic, IndiVariables::est, IndiEstimation::rate, IndiVariables::rate, register_periodic_telemetry(), send_att_indi(), STABILIZATION_INDI_FILT_OMEGA, STABILIZATION_INDI_FILT_OMEGA_R, STABILIZATION_INDI_FILT_ZETA, stabilization_indi_second_order_filter_init(), IndiEstimation::u, and IndiVariables::u.
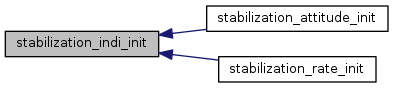
Referenced by stabilization_attitude_init(), and stabilization_rate_init().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_indi_read_rc | ( | bool | in_flight, |
| bool | in_carefree, | ||
| bool | coordinated_turn | ||
| ) |
Definition at line 321 of file stabilization_indi.c.
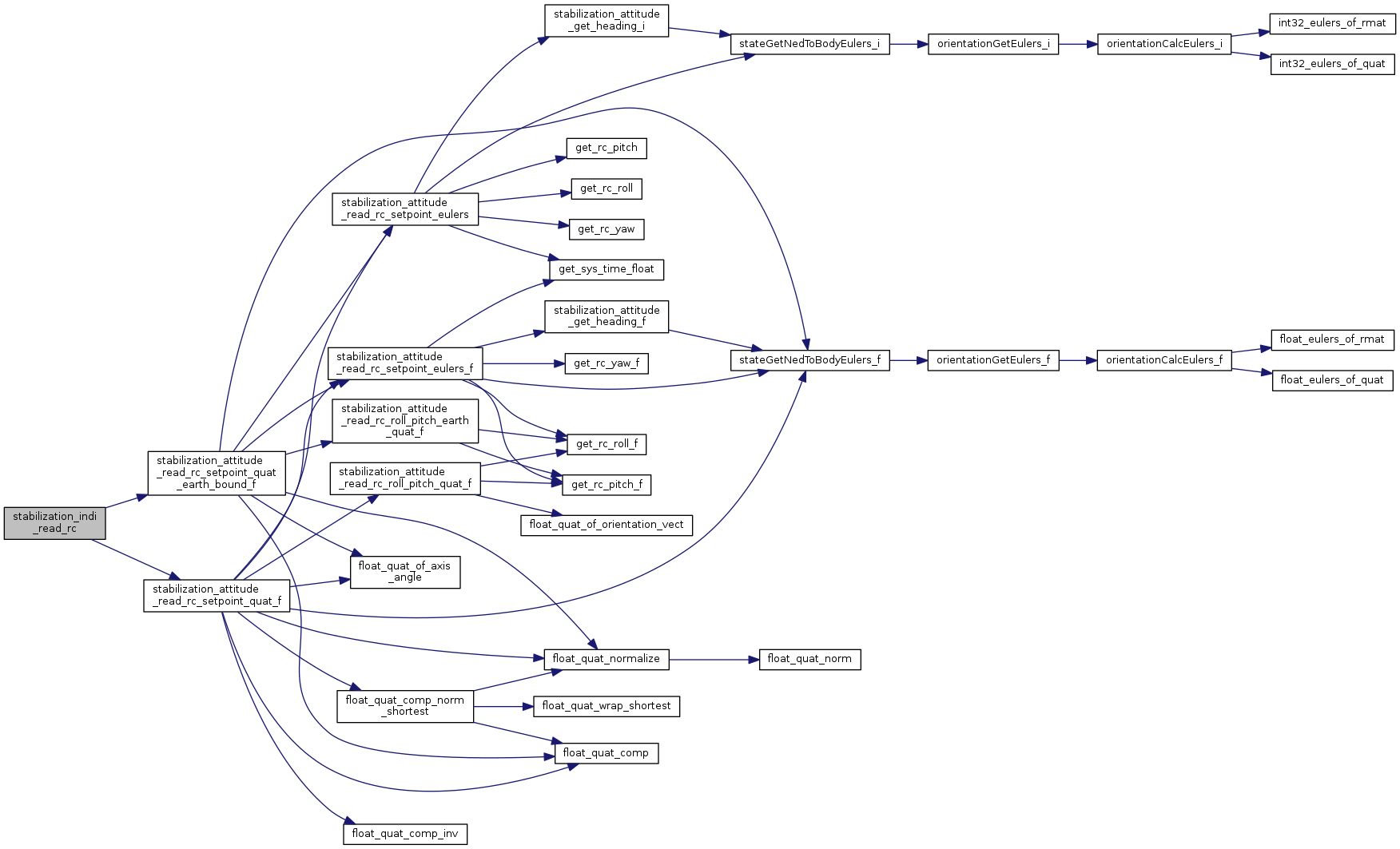
References QUAT_BFP_OF_REAL, stab_att_sp_quat, stabilization_attitude_read_rc_setpoint_quat_earth_bound_f(), and stabilization_attitude_read_rc_setpoint_quat_f().
Referenced by stabilization_attitude_read_rc().
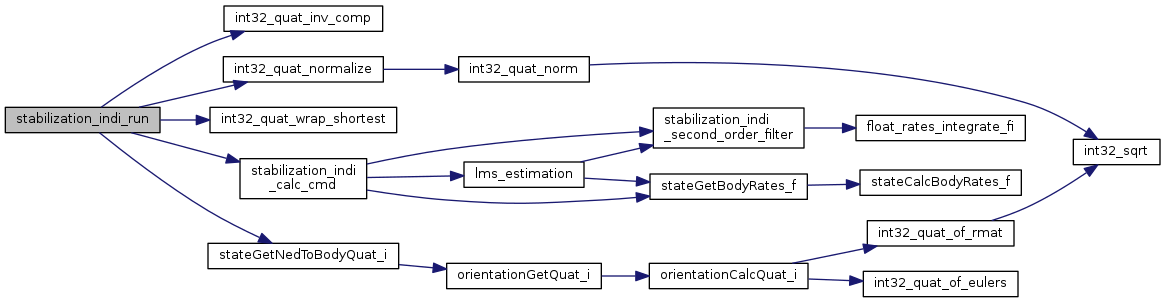
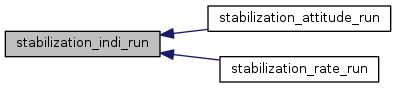
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_indi_run | ( | bool | enable_integrator, |
| bool | rate_control | ||
| ) |
Definition at line 296 of file stabilization_indi.c.
References int32_quat_inv_comp(), int32_quat_normalize(), int32_quat_wrap_shortest(), MAX_PPRZ, stab_att_sp_quat, stabilization_att_indi_cmd, stabilization_cmd, stabilization_indi_calc_cmd(), and stateGetNedToBodyQuat_i().
Referenced by stabilization_attitude_run(), and stabilization_rate_run().
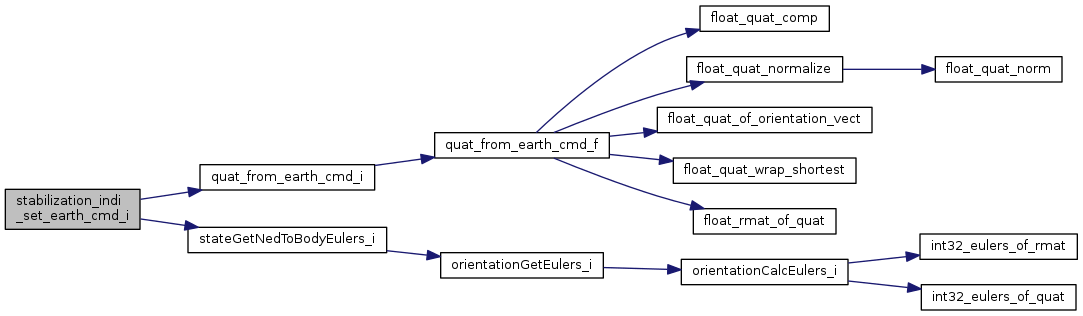
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_indi_set_earth_cmd_i | ( | struct Int32Vect2 * | cmd, |
| int32_t | heading | ||
| ) |
Definition at line 191 of file stabilization_indi.c.
References heading, INT32_TRIG_FRAC, Int32Eulers::phi, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Eulers::psi, quat_from_earth_cmd_i(), stab_att_sp_euler, stab_att_sp_quat, stateGetNedToBodyEulers_i(), Int32Eulers::theta, Int32Vect2::x, and Int32Vect2::y.
Referenced by stabilization_attitude_set_earth_cmd_i().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_indi_set_failsafe_setpoint | ( | void | ) |
Definition at line 173 of file stabilization_indi.c.
References PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, stab_att_sp_quat, and stabilization_attitude_get_heading_i().
Referenced by stabilization_attitude_set_failsafe_setpoint().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_indi_set_rpy_setpoint_i | ( | struct Int32Eulers * | rpy | ) |
Definition at line 183 of file stabilization_indi.c.
References quat_from_rpy_cmd_i(), stab_att_sp_euler, and stab_att_sp_quat.
Referenced by stabilization_attitude_set_rpy_setpoint_i().
Here is the call graph for this function: Here is the caller graph for this function:| struct IndiVariables indi |
Definition at line 88 of file stabilization_indi.c.
| struct Int32Eulers stab_att_sp_euler |
with INT32_ANGLE_FRAC
Definition at line 45 of file stabilization_attitude_euler_float.c.
Referenced by guidance_flip_run(), guidance_hybrid_set_cmd_i(), reset_psi_ref_from_body(), send_att(), send_att_ref(), stabilization_attitude_enter(), stabilization_attitude_init(), stabilization_attitude_read_rc(), stabilization_attitude_read_rc_setpoint_quat_earth_bound_f(), stabilization_attitude_read_rc_setpoint_quat_f(), stabilization_attitude_run(), stabilization_attitude_set_earth_cmd_i(), stabilization_attitude_set_failsafe_setpoint(), stabilization_attitude_set_rpy_setpoint_i(), stabilization_indi_enter(), stabilization_indi_set_earth_cmd_i(), and stabilization_indi_set_rpy_setpoint_i().
| struct Int32Quat stab_att_sp_quat |
with INT32_QUAT_FRAC
Definition at line 127 of file stabilization_attitude_heli_indi.c.
Referenced by guidance_hybrid_set_cmd_i(), stabilization_attitude_init(), stabilization_attitude_read_rc(), stabilization_attitude_run(), stabilization_attitude_set_earth_cmd_i(), stabilization_attitude_set_failsafe_setpoint(), stabilization_attitude_set_rpy_setpoint_i(), stabilization_attitude_set_setpoint_rp_quat_f(), stabilization_indi_read_rc(), stabilization_indi_run(), stabilization_indi_set_earth_cmd_i(), stabilization_indi_set_failsafe_setpoint(), and stabilization_indi_set_rpy_setpoint_i().
 1.8.8
1.8.8