|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
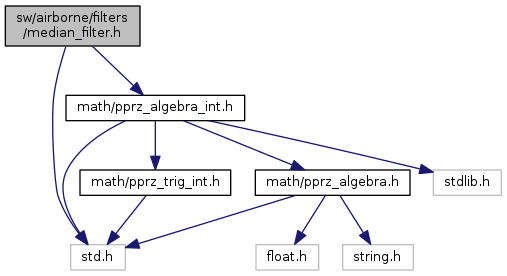
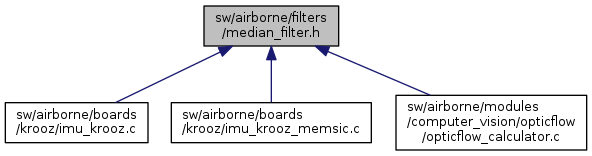
 Include dependency graph for median_filter.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for median_filter.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | MedianFilterInt |
| struct | MedianFilter3Int |
Macros | |
| #define | MEDIAN_DATASIZE 5 |
| #define | InitMedianFilterVect3Int(_f) |
| #define | InitMedianFilterEulerInt(_f) InitMedianFilterVect3Int(_f) |
| #define | InitMedianFilterRatesInt(_f) InitMedianFilterVect3Int(_f) |
| #define | UpdateMedianFilterVect3Int(_f, _v) |
| #define | UpdateMedianFilterEulerInt(_f, _v) |
| #define | UpdateMedianFilterRatesInt(_f, _v) |
| #define | GetMedianFilterVect3Int(_f, _v) |
| #define | GetMedianFilterEulerInt(_f, _v) |
| #define | GetMedianFilterRatesInt(_f, _v) |
Functions | |
| void | init_median_filter (struct MedianFilterInt *filter) |
| int32_t | update_median_filter (struct MedianFilterInt *filter, int32_t new_data) |
| int32_t | get_median_filter (struct MedianFilterInt *filter) |
| struct MedianFilterInt |
Definition at line 32 of file median_filter.h.
| Data Fields | ||
|---|---|---|
| int32_t | data[MEDIAN_DATASIZE] | |
| int8_t | dataIndex | |
| int32_t | sortData[MEDIAN_DATASIZE] | |
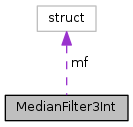
| struct MedianFilter3Int |
Definition at line 84 of file median_filter.h.
Collaboration diagram for MedianFilter3Int:| Data Fields | ||
|---|---|---|
| struct MedianFilterInt | mf[3] | |
| #define GetMedianFilterEulerInt | ( | _f, | |
| _v | |||
| ) |
Definition at line 121 of file median_filter.h.
| #define GetMedianFilterRatesInt | ( | _f, | |
| _v | |||
| ) |
Definition at line 127 of file median_filter.h.
| #define GetMedianFilterVect3Int | ( | _f, | |
| _v | |||
| ) |
Definition at line 115 of file median_filter.h.
| #define InitMedianFilterEulerInt | ( | _f | ) | InitMedianFilterVect3Int(_f) |
Definition at line 94 of file median_filter.h.
| #define InitMedianFilterRatesInt | ( | _f | ) | InitMedianFilterVect3Int(_f) |
Definition at line 95 of file median_filter.h.
Referenced by imu_navgo_init().
| #define InitMedianFilterVect3Int | ( | _f | ) |
Definition at line 88 of file median_filter.h.
Referenced by imu_krooz_init(), and imu_navgo_init().
| #define MEDIAN_DATASIZE 5 |
Definition at line 27 of file median_filter.h.
Referenced by get_median_filter(), init_median_filter(), and update_median_filter().
| #define UpdateMedianFilterEulerInt | ( | _f, | |
| _v | |||
| ) |
Definition at line 103 of file median_filter.h.
| #define UpdateMedianFilterRatesInt | ( | _f, | |
| _v | |||
| ) |
Definition at line 109 of file median_filter.h.
Referenced by imu_navgo_event().
| #define UpdateMedianFilterVect3Int | ( | _f, | |
| _v | |||
| ) |
Definition at line 97 of file median_filter.h.
Referenced by imu_krooz_event(), imu_krooz_periodic(), and imu_navgo_event().
|
inline |
Definition at line 79 of file median_filter.h.
References MEDIAN_DATASIZE, and MedianFilterInt::sortData.
|
inline |
Definition at line 41 of file median_filter.h.
References MedianFilterInt::data, MedianFilterInt::dataIndex, MEDIAN_DATASIZE, and MedianFilterInt::sortData.
Referenced by baro_init(), and opticflow_calc_init().
Here is the caller graph for this function:
|
inline |
Definition at line 51 of file median_filter.h.
References MedianFilterInt::data, MedianFilterInt::dataIndex, MEDIAN_DATASIZE, and MedianFilterInt::sortData.
Referenced by ardrone_baro_event(), calc_edgeflow_tot(), and calc_fast9_lukas_kanade().
Here is the caller graph for this function: 1.8.8
1.8.8