|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
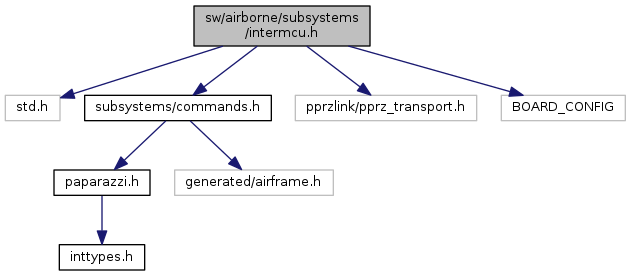
Rotorcraft Inter-MCU interface. More...
#include "std.h"#include "subsystems/commands.h"#include "pprzlink/pprz_transport.h"#include <BOARD_CONFIG> Include dependency graph for intermcu.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for intermcu.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | intermcu_t |
Macros | |
| #define | INTERMCU_AP 0 |
| #define | INTERMCU_FBW 1 |
| #define | INTERMCU_LOST_CNT 25 /* 50ms with a 512Hz timer TODO fixed value */ |
| #define | INTERMCU_SET_CMD_STATUS(_bit) { intermcu.cmd_status |= (1 << _bit); } |
| #define | INTERMCU_CLR_CMD_STATUS(_bit) { intermcu.cmd_status &= ~(1 << _bit); } |
| #define | INTERMCU_GET_CMD_STATUS(_bit) (intermcu.cmd_status & (1 << _bit)) |
Enumerations | |
| enum | intermcu_status { INTERMCU_OK, INTERMCU_LOST } |
| enum | intermcu_PX4_baud_status { PX4_BAUD, CHANGING_BAUD, PPRZ_BAUD } |
| enum | intermcu_cmd_status { INTERMCU_CMD_MOTORS_ON, INTERMCU_CMD_DISARM } |
Functions | |
| void | intermcu_init (void) |
| void | intermcu_periodic (void) |
Variables | |
| struct intermcu_t | intermcu |
Rotorcraft Inter-MCU interface.
Definition in file intermcu.h.
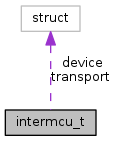
| struct intermcu_t |
Definition at line 68 of file intermcu.h.
Collaboration diagram for intermcu_t:| Data Fields | ||
|---|---|---|
| uint8_t | cmd_status | Command status information that is transfered (intermcu_cmd_status) |
| struct link_device * | device | Device used for communication. |
| bool | enabled | If the InterMCU communication is enabled. |
| bool | msg_available | If we have an InterMCU message. |
| enum intermcu_status | status | Status of the INTERMCU. |
| uint8_t | time_since_last_frame | Time since last frame. |
| struct pprz_transport | transport | Transport over communication line (PPRZ) |
| #define INTERMCU_AP 0 |
Definition at line 34 of file intermcu.h.
Referenced by intermcu_send_spektrum_bind(), intermcu_set_actuators(), and telemetry_intermcu_send_message().
| #define INTERMCU_CLR_CMD_STATUS | ( | _bit | ) | { intermcu.cmd_status &= ~(1 << _bit); } |
Definition at line 64 of file intermcu.h.
Referenced by intermcu_parse_msg(), and opa_controller_periodic().
| #define INTERMCU_FBW 1 |
Definition at line 35 of file intermcu.h.
Referenced by intermcu_on_rc_frame(), and intermcu_send_status().
| #define INTERMCU_GET_CMD_STATUS | ( | _bit | ) | (intermcu.cmd_status & (1 << _bit)) |
Definition at line 65 of file intermcu.h.
Referenced by intermcu_parse_msg(), and opa_controller_periodic().
| #define INTERMCU_LOST_CNT 25 /* 50ms with a 512Hz timer TODO fixed value */ |
Definition at line 38 of file intermcu.h.
Referenced by intermcu_periodic().
| #define INTERMCU_SET_CMD_STATUS | ( | _bit | ) | { intermcu.cmd_status |= (1 << _bit); } |
Definition at line 63 of file intermcu.h.
Referenced by intermcu_set_actuators(), and opa_controller_ap_disarm().
| enum intermcu_cmd_status |
| Enumerator | |
|---|---|
| INTERMCU_CMD_MOTORS_ON |
The status of autopilot_motors_on. |
| INTERMCU_CMD_DISARM |
Whether or not to dis-arm the FBW. |
Definition at line 57 of file intermcu.h.
| Enumerator | |
|---|---|
| PX4_BAUD | |
| CHANGING_BAUD | |
| PPRZ_BAUD | |
Definition at line 50 of file intermcu.h.
| enum intermcu_status |
| Enumerator | |
|---|---|
| INTERMCU_OK |
InterMCU communication is OK. |
| INTERMCU_LOST |
No interMCU communication anymore. |
Definition at line 44 of file intermcu.h.
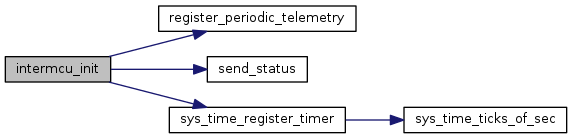
| void intermcu_init | ( | void | ) |
Definition at line 64 of file intermcu_ap.c.
References DefaultPeriodic, register_periodic_telemetry(), send_status(), sys_time_register_timer(), and intermcu_t::transport.
Referenced by main_init().
Here is the call graph for this function: Here is the caller graph for this function:| void intermcu_periodic | ( | void | ) |
Definition at line 74 of file intermcu_ap.c.
References INTERMCU_LOST, INTERMCU_LOST_CNT, intermcu_t::status, and intermcu_t::time_since_last_frame.
Referenced by main_periodic().
Here is the caller graph for this function:| struct intermcu_t intermcu |
Definition at line 41 of file intermcu_ap.c.
Referenced by fbw_on_rc_frame(), fbw_safety_check(), main_periodic(), opa_controller_periodic(), and telemetry_intermcu_send_message().
 1.8.8
1.8.8